AGV移動タスクのカスタマイズ
概要と主要な概念
FlexsimのAGVモジュールは、AGV移動オペレーションを誘導する方法に高い柔軟性を提供します。AGVは、主に、AGVパスネットワーク上のコントロールポイント目的地に移動しますが、必要に応じてこの機能をカスタマイズすることができます。まず、AGVが移動する目的地コントロールポイントのパスに沿ったオフセット距離を定義できます。次に、AGVが移動するAGVの「輸送列本体」に沿ったオフセット距離を定義できます。これは、AGVボディオフセット距離で直接定義することも、AGVトレーラーのいずれかをAGVが移動する場所に相対するオブジェクトとして定義することによって定義することもできます。
このカスタマイズのすべてが、後述するように、TASKTYPE_TRAVELタスクのそれ以外では使用されないパラメータを使用して行われます。処理フローでタスクシーケンスロジックを定義している場合は、AGVの移動タスクシーケンスアクティビティを使用して、移動タスクのこれらのカスタムパラメータを定義できます。
この2つのオフセットメカニズム(別々にまたは組み合わせて)を使用することにより、コントロールポイントだけでなく、AGVパスネットワーク上の任意のポイントへの移動が要求される複雑な移動オペレーションをより簡単にシミュレートできます。これは、特に、輸送列の連結や操車場での連結解除などのオペレーションをシミュレートする場合に便利です。
目的地パスオフセットを定義する
AGVに移動タスクを付与する場合は、目的地パスに沿った目標オフセットを定義できます。このオフセットは、目的地コントロールポイントに相対しており、パスの主方向に沿って進みます。
このオフセットは、移動タスクのVar 2パラメータを通して定義します。必要なオフセット距離を数値として渡すと、AGVは、目的地コントロールポイントからその距離だけオフセットされた中心位置に向かって移動します。
これを処理フローを通して定義している場合は、AGVの移動アクティビティを使用できます。
目的地AGVボディオフセットを定義する
AGVに移動タスクを付与する場合は、AGVの「輸送列本体」に沿った目標オフセットを定義できます。このオフセットは、AGVに関連付けられたトレーラーに沿って移動するAGVの中心からの距離を表しているため、AGVの輸送列本体に沿って前方に進みます。正のオフセットはAGVの前方にあるターゲットを定義しますが、負のオフセットはAGVの後方にあるターゲットを定義します。
このオフセットは、移動タスクのVar 3パラメータを通して定義します。必要なオフセット距離を数値として渡すと、AGVは、目標目的地にあるこのオフセットボディ位置に向かって移動します。
この値の列挙AGV.BodyOffsetを指定することもできます。AGVは、自動的に、関連するオフセット距離を解決します。
これを処理フローを通して定義している場合は、AGVの移動アクティビティを使用できます。
トレーラーに相対する目的地を定義する
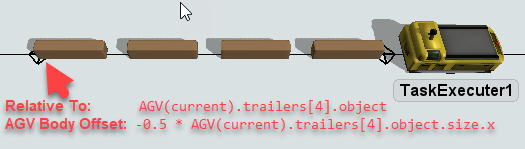
AGVのトレーラーのいずれかに「相対する」移動目的地を定義することもできます。これは、厳密に言えば、すでに[AGVボディオフセット]オプションを使用して完了していますが、オブジェクトの「相対」を定義することで、より複雑な可能性のあるボディオフセット計算をバイパスできます。さらに、AGVボディオフセットは、「相対」トレーラーとの組み合わせで機能するため、その両方を使用して、たとえば、中心とは対照的に、指定されたトレーラーの背面または前面に相対するターゲットに移動できます。
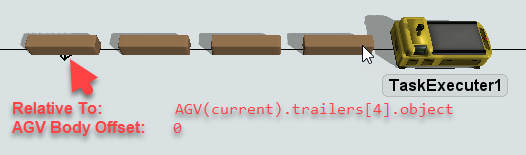
「相対」トレーラーは移動タスクのInvolved 2パラメータを通して定義します。目標トレーラーオブジェクトを渡すと、AGVは、目標目的地にあるトレーラーの中心に向かって移動します(追加されたAGVボディオフセット距離は0とします)。
これを処理フローを通して定義している場合は、AGVの移動アクティビティを使用できます。
「相対」オブジェクトの定義では、AGVのトレーラーへのアクセス方法に精通していると役に立ちます。詳細については、AGVインターフェイスリファレンスを参照してください。
AGVボディオフセットと「相対」トレーラーを定義する例を以下に示します。
減速と終了速度
通常、目的地まで移動するタスクをAGVに与えるときは、完全に減速して停止したその移動タスクを終了するようにAGVに要求します。しかしながら、まだ動いている状態で移動タスクを終えることを求める場合もあります。送付をその場で決定する場合などです。その場合、移動タスクにゼロ以外の終了速度を定義できます。これを行うと、実際には、終了時のAGVの位置と同様に、移動タスクの終了時間が早めにシフトされます。言い換えると、動いているうちに宛先のコントロールポイントで終了する代わりに、定義された終了速度でAGVがコントロールポイントに近づいている間に移動タスクが終了します。後続の移動タスクをAGVにすぐに与えない場合、AGVは停止まで減速し、移動タスクが完了してからコントロールポイントに到着します。ただし、新しい移動タスクをAGVにすぐに与える場合、続けて新しいタスクに取りかかります。前のタスクの終了速度から始め、元の宛先のコントロールポイントを通過して移動します。
AGVシステムのデフォルトの終了速度動作は、厳密に言えば、FlexSimのTASKTYPE_TRAVELタスクの標準に従っていません。FlexSimの標準移動タスク仕様では、0の終了速度はタスク実行者の最大速度で終了することを意味することになっています。根拠は、多くの場合、移動タスクの後ろにオフセットタスク(ロード、アンロード)が続くことです。タスク実行者に、減速して停止したら、すぐに0から開始してオフセット移動を実行して欲しいとは思いません。そのため、0の「デフォルト」終了速度は、移動タスクがまだ移動中のタスク実行者と一緒に終了する必要があることを意味します。その後、タスク実行者はオフセットタスクに進みます。
ただし、AGVシステムでは、0の終了速度は0の終了速度を意味します。これは、標準と矛盾しています。このAGVシステムとFlexSimの標準間の矛盾は、通常は問題になりません。これは、AGVシステムの初期バージョンでは、AGVがオフセット移動を実行できないからです。今も、AGVはデフォルトでオフセット移動を実行しません。ただし、現在は、AGVにオフセット移動を実行する機能が含まれているため、特に、オフセット移動ロジックを追加した場合は、矛盾がより明らかになります。これを解決するために、AGVネットワークプロパティの[一般]タブで[移動終了速度0は最高速度を意味する]ボックスをオンにすることができます。これにより、AGVシステムと標準移動メカニズムが一致します。