AGVオフセット移動の追加
概要と主要な概念
AGVシステムを使用すれば、カスタムオフセット移動オペレーションを定義することができます。これは、特に、AGVがラックに沿った複数のポイントでピックして配置するような入庫状況で役に立ちます。ラックに沿った、可能性のあるすべてのピック/配置場所にコントロールポイントを配置するのは手間のかかる作業です。

また、単一のラックがアイテムを配置する目的地を表している場合は、特定のドロップオフ/ピックアップスロットを定義するときでさえ、AGVがそのラックに到着するまでアイテムを配置すべき実際のベイが選択されません。
AGVシステムを使用すれば、オフセット目的地を動的に定義することができます。オフセット移動オペレーションの一部として、AGVをコントロールポイントに直接送信するのではなく、AGVパスシステム上の任意のポイントに送信できます。
オフセット移動の設定
AGVオフセット移動を設定するには:
- AGVネットワークに接続したAGVの移動オフセット設定が[オフセットの移動にはナビゲータを使用]に設定されていることを確認します。
- [ツールボックス]で、[AGVネットワーク]プロパティウィンドウを開きます。
- [トリガー]タブを選択してから、[追加]ボタン
 を押して、ドロップダウンメニューから[AGVオフセット移動時]を選択します。
を押して、ドロップダウンメニューから[AGVオフセット移動時]を選択します。
パス上の動的場所への送信
次にやるべきことは、AGVにオフセット移動をどのように実行させるかによって異なります。AGVを目的地パスに沿った動的場所に移動したい場合(前述の「可能性のある多くの場所」シナリオ)は、次の作業を行います。
- [トリガー]タブの[AGVオフセット移動時]で、[追加]ボタン
 を押して、[AGVをコントロールポイントパスに沿った最も近いポイントに送る]を選択します。
を押して、[AGVをコントロールポイントパスに沿った最も近いポイントに送る]を選択します。 - ポップアップ以外の場所をクリックしてから、[OK]を押して、[AGVネットワーク]プロパティウィンドウを閉じます。
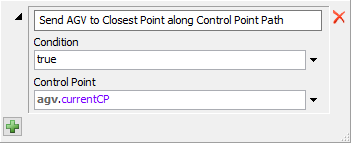
これにより、AGVが目的地コントロールポイントのパスに沿ったオフセット距離に移動します。
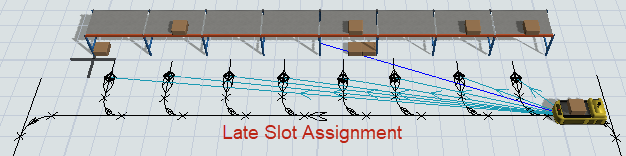
最も近いコントロールポイントへの送信
AGVをオフセット場所に最も近いコントロールポイントに移動したい場合(前述の「遅いスロット割り当て」シナリオ)は、次の作業を行います。
- [トリガー]タブの[AGVオフセット移動時]で、[追加]ボタンを押して、[AGVを最も近い接続されたコントロールポイントに送る]を選択します。
- ポップアップ以外の場所をクリックしてから、[OK]を押して、[AGVネットワーク]プロパティウィンドウを閉じます。
- 3Dモデルで、DropoffPoints接続をドロップオフポイントになる可能性のあるポイントに追加し、PickupPoints接続をピックアップポイントになる可能性のあるポイントに追加します。ポイントがどちらにもなる可能性がある場合は、そのポイントを両方の接続タイプに接続します。
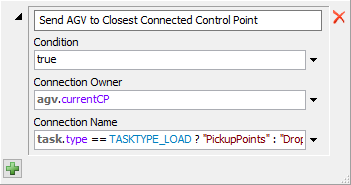
これにより、AGVが目標オフセット場所に最も近い接続されたコントロールポイントに移動します。
移動終了速度の設定
先にオフセット移動を設定すると、AGVがオフセット移動オペレーションを実行する前に減速して目的地コントロールポイントで停止することが分かります。AGVがオフセットに進む前に全速力で初期移動タスクを終了するようにしたい場合は、AGV移動タスクのカスタマイズ > 減速と終了速度で詳細を確認してください。