AGV累積タイプ
概要と主要な概念
[累積タイプ]を利用すると、累積パス、すなわち、AGVが近接性を検出し、互いの衝突を回避するパスのパラメータを定義できます。
[AGV累積タイプ]ページには、パスまたはコントロールポイントを右クリックして、[AGVネットワークプロパティ]を選択することによりアクセスできます。
[累積タイプ]タブ
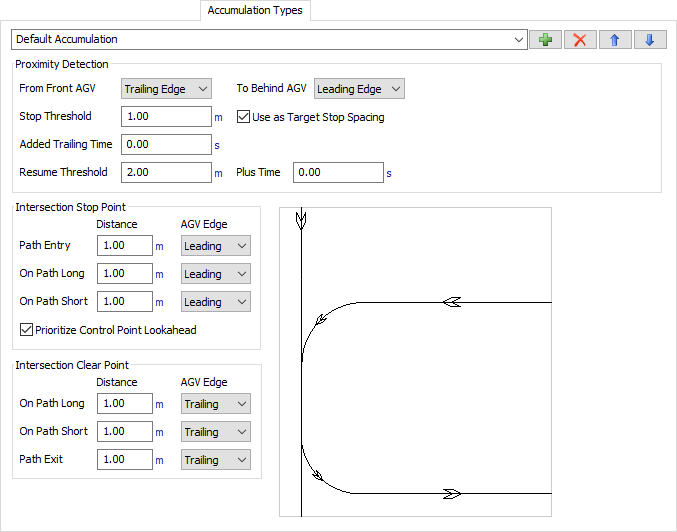
[累積タイプ]タブには、次のプロパティがあります。
累積タイプはページ上部にあるコンボボックスやボタンで追加、削除、名前変更、並べ替えします。
パスに累積タイプを割り当てるには、パスをクリックし、右にある[クイックプロパティ]で[累積タイプ]ドロップダウンから目的のタイプを選択します。
近接検出
これらのプロパティは、2つのAGVが共通の累積パス上で近接性を検出する仕組みを定義します。
- フロントAGVから <縁> AGVの背後へ <縁> - これは近接性の判断に使用されるAGVの縁を定義します。通常は[フロントAGVから <後縁> AGVの背後へ <前縁>]がデフォルトになります。これにより、前方AGVの後部から後方のAGVの前部までの距離が求められます。中心から中心までの距離を測る[フロントAGVから <中央> AGVの背後へ <中央>]なども選択できます。
- 停止しきい値 - この距離になると、AGVは「近接停止」状態に入り、減速して停止します。
- 目標停止間隔として使用 - これを選択した場合、前方のAGVが停止すると、停止しきい値により目標停止間隔が定義されます。停止したAGVはこの停止間隔で累積します。言い換えると、停止したAGVに近づくAGVは(近接距離としての)停止しきい値を超える前に減速を開始し、停止します。停止しきい値で停止し、前方のAGVの後ろに目標間隔を与えるように減速を開始します。両方のAGVが依然として動いている場合、停止しきい値は通常の近接検出に引き続き使用されます。
- 追加追随時間 - 直接距離ベースの近接検出に加えて、時間ベースの近接検出も含めることができます。つまり、AGVをmメートル遅らせることに加えて(または代わりに)、n秒遅らせることができます。時間ベースの追随を追加すると、AGVは速く移動するほどお互いの間隔が開くことになります。たとえば、5秒の追随時間は、AGVが毎秒1メートルで移動している場合は、前のAGVの5メートル後ろを維持する必要があることを意味しますが、毎秒2メートルで移動している場合は、10メートル後ろを維持する必要があることを意味します。
- 再開しきい値 - 「近接停止」状態に入った後、AGVがその移動を再開できる近接距離。再開しきい値は停止しきい値より大きくする必要があります。
- プラス時間 - 再開しきい値に到達したときに開始する、任意の追加時間。「近接停止」状態から復帰するまでAGVはこの時間だけ待機します。
交点
あるパスに累積タイプを定義すると、AGVネットワークでは、そのパス上の交点が割り当てとして処理されます。AGVがコントロールポイントとコントロールエリアを割り当てる方法と同様に、AGVは、交点を通過する前に、累積パス上で交点を割り当てる必要があります。[累積タイプ]ページで、停止距離を定義できます。これは交点前の距離であり、AGVがそれを割り当てできない場合、AGVは交点前で停止する必要があります。停止距離は間隔でもあり、交点を通過してこの距離だけ空いたら、AGVは交点を解放し、別のAGVに利用させることができます。以上の距離はいずれも、AGVがパスに入るとき、パスから出るとき、パス上にいるときで分類されます。すでにパス上にいるか、パス上に残っている場合、距離はパスの幾何的配置によって分類されます。すなわち、AGVから離れるか、AGVに向かうように交点は分岐します。
交差点の停止地点
ここでは、交点の停止距離を定義します。距離ごとに、距離自体とAGVの端を定義します。これにより、停止距離でAGVのどの部分が停止するべきかが決定されます。通常、停止距離はAGVの前縁に基づきます。特定のフィールド内をクリックすると、定義している距離や端が右側の図に表示され、フィールドが正確に何を定義しているか把握するのに役立ちます。
- パスエントリ - これで定義される停止距離とAGVの端は、パスに入るときに適用されます。
- オンパスロング - これで定義される停止距離とAGVの端は、すでにパス上にいるとき、交点に近づくときに適用されます。AGVに向かって分岐するため、合流するAGVのための空間を与える目的で、離れて停止することをAGVに要求する交点に適用されます。そのため「長い」停止距離が取られます。
- オンパスショート - これで定義される停止距離とAGVの端は、すでにパス上にいるとき、交点に近づくときに適用されます。AGVから離れて分岐するため、AGVは問題を引き起こすことなく近づいて停止できる交点に適用されます。そのため「短い」停止距離が取られます。
- コントロールポイント先読みの優先順位付け - オンになっている場合は、交点の手前にコントロールポイントが存在すると、パス転送の割り当て前にコントロールポイントの先読みメカニズムが働くように、パス転送の停止ポイント/割り当てポイントがが調整されます。これにより、特定の環境でのグリッドロックが回避されます。
この使用例として、AGVの前縁がパス転送を割り当てることができない場合に特定の交点の1メートル手前で停止するように停止ポイントを設定したとしましょう。その後で、コントロールポイントを交点のより近くに配置します。それは、AGVの前縁が交点から0.5メートルの位置だとします。[優先順位付け]ボックスをオンにした場合は、パス転送を割り当てるために1メートル手前で停止する代わりに、AGVがコントロールポイントまで移動してから、先を見越して次のコントロールポイントを割り当て、パス転送の割り当てを試みるように、パス転送の割り当てポイントが前方に調整されます。これにより、特に、コントロールポイントとコントロールエリアを特定の場所に配置することによって手動での調整が可能で、コントロールポイント/エリアの相互排除の一環として常にブロッキングが発生するため、潜在的なグリッドロック問題が解決されます。
交点クリアポイント
ここでは、交点のクリア距離を定義します。停止距離と同様に、距離自体とAGVの端を定義します。通常、クリア距離はAGVの後縁に基づきます。特定のフィールド内をクリックすると、定義している距離や端が右側の図に表示され、フィールドが正確に何を定義しているか把握するのに役立ちます。
- オンパスロング - これで定義されるクリア距離とAGVの端は、まだパス上にいるときに(パスから出ていない)、交点を空ける際に適用されます。クリアポイントに向かって分岐するため、クリア前に離れて停止することをAGVに要求する交点に適用されます。そのため「長い」クリア距離が取られます。
- オンパスショート - これで定義されるクリア距離とAGVの端は、まだパス上にいるときに(パスから出ていない)、交点を空ける際に適用されます。クリアポイントから離れて分岐するため、AGVは問題を引き起こすことなく近づいてクリアできる交点に適用されます。そのため「短い」クリア距離が取られます。
- パス出口 - これで定義されるクリア距離とAGVの端は、パスから出るときに適用されます。
特別ルール
交点の割り当てに適用される特別な規則がいくつかあります。
- Pure On-Path Allocations - AGVネットワークは、基本的な近接検出が交差の停止とクリアポイントに優先するように試行します。そのため、パス上AGVの前方に別のAGVがいて、それに対して近接性が検出されても、その交点でパスから出ない場合、AGVには、前方のAGVが交点をクリアする前に交点を割り当てることが許可されます。前方のAGVで近接性がすでに検出されているため、交点を同時に割り当てることに問題はありません。基本的な近接検出で近接エラーか回避されるためです。
- End-To-End Path Transfers - あるパスの終わりから別のパスの始まりまで転送するとき、ネットワークではそれが2つのパス間の「交差」として処理されます。すなわち、交点の割り当てが必要になります。しかしながら、再度、新しいパスに転送するとき、転送前に検出していた同じAGVとの近接性をAGVが検出するとき、そのAGVは先に進み、両方のAGVで交点を割り当てることを許可します。基本的な近接検出で近接エラーが回避されるためです。これは、同じ累積タイプの2つのパス間の転送にのみ適用されます。累積タイプが異なる場合、それは通常の交点割り当てのように扱われます。
AGV累積のトラブルシューティング
AGVシステムで累積を使用する場合は、デッドロック問題が発生する可能性があります。このような問題の修正方法の詳細については、「AGV累積のトラブルシューティング」を参照してください。