[ロボット]パネル
[ロボット]パネルには、ロボットの移動をコントロールするためのオプションがあります。
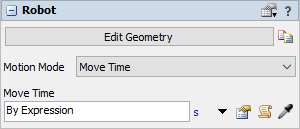
[ロボット]パネルには、次のプロパティがあります。
ジオメトリを編集
このボタンを押すと、[ロボットジオメトリ]ウィンドウが開きます。
動作モード
ロボットは、固定リソースによって作成されたタスクシーケンスにクレーンオブジェクトと同様の方法で対応します。具体的には、ロボットはFRLOAD、FRUNLOAD、TRAVELTOLOC、TRAVELRELATIVEタスクタイプに対応します。ロボットには4つのオペレーションモードがあります。ロボットがタスクに対応する方法のほか、何よりタスクの実行にかかる時間がモードによって異なります。[動作モード]メニューの下には、選択したオプションに応じて異なるプロパティが表示されます。
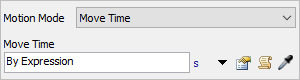
- [移動時間] - デフォルトのオプション。ここでは、コードで明示的に移動時間を定義します。
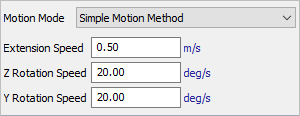
- [シンプルモーション方法] - このオプションでは、移動時間を決定するいくつかの基本速度入力を指定できます。
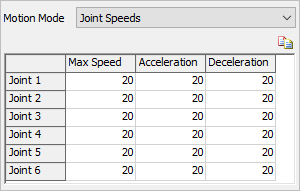
- ジョイント速度を使用 - ここでは、ロボットのジョイントごとに速度を定義します。
- モーションパスを定義 - 「ロボットのモーションパス」トピックで説明されている最も柔軟なオプションです。
[ロボットジオメトリ]ウィンドウ
[ロボットジオメトリ]ウィンドウには、次のプロパティがあります。
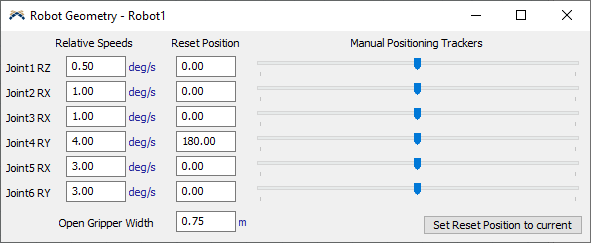
相対速度
この列のオプションは、各ジョイントの相対速度をコントロールします。
リセット位置
この列のオプションは、ロボットがリセット時に戻る位置をコントロールします。
手動位置トラッカー
この列のスライダーは、各ジョイントの現在の位置をコントロールします。
オープングリッパ幅
このオプションは、グリッパが開いているときのグリッパの開き具合をコントロールします。
リセット位置を現在の値に設定
このオプションは、ロボットの現在位置をリセット位置として保存します。