AGVネットワークにエレベーターを追加する
AGVネットワークへのエレベーター追加の概要
AGVシステムの中には、AGVがエレベーターを使って複数のフロアに移動する必要があるものもあります。次の例では、AGVはエレベーターを使用してフロア間を移動して、3つの異なる上層フロアにアイテムを輸送します。
AGVがエレベーターで複数フロアに移動するビジネスシステムをシミュレーションしている場合は、このトピックの残りの部分で説明するタスクを完了する必要があります。これらのタスクは推奨されている順序で表示されており、その通りに実行する必要があります。
複数のフロアレイアウトを作成する
最初のステップでは、複数のフロアを持つレイアウトを作成します。次の画像に示すように、シミュレーションモデル内でフロアが積み重なったモデルを作成することもできます。
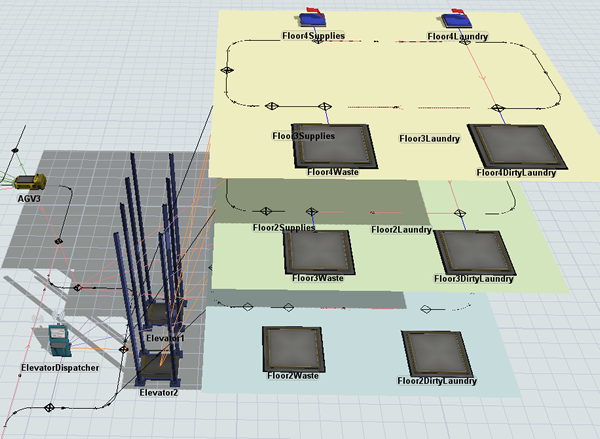
次の画像に示すように、1階と同じ平面上に配置したまま、モデルの異なるセクションに上層フロアを配置することもできます。
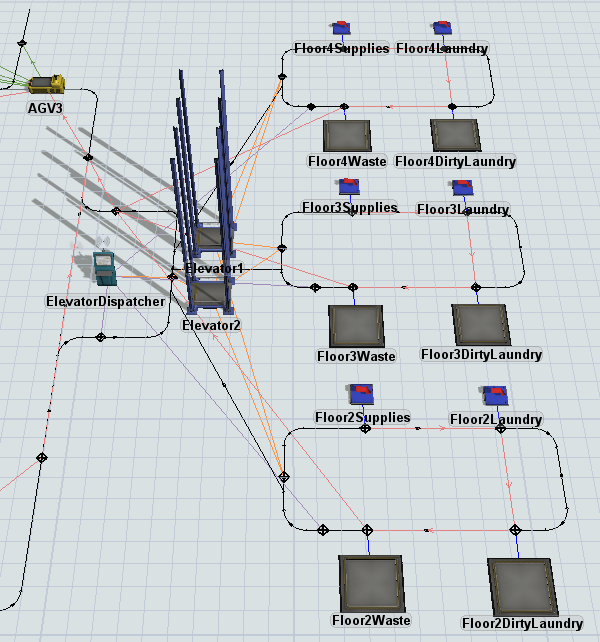
積層階モデルには、少しだけリアルに見えるという利点があります。ただし、複数の階を同じ平面上に配置すると、処理がはるかに簡単になるという利点があります。また、開始する平面を同じ平面上に作成してから、シミュレーションプロジェクトの終わりに向かってフロアを積み重ねた位置に移動することも考えられます。マルチレベルシミュレーションモデルの操作の詳細については、「モデルレイアウトを作成する」を参照してください。
エレベーターコントロールポイント接続のタイプ
AGVネットワークロジックを構築するで説明したように、コントロールポイントはAGVネットワークの基本的な構成要素です。AGVエレベーターシステムは、以下の可能な接続タイプのコントロールポイントを使用します。
| タイプ | 説明 | 外観 |
|---|---|---|
| エレベーターフロアCP | エレベーターフロアのコントロールポイントは、AGVが各階のエレベーターに出入りする点になります。AGVがエレベーターフロアのコントロールポイントを通過すると、エレベーターの内側に表示されます。AGVがエレベーターを出ると、エレベーターフロアのコントロールポイントに表示されます。 | 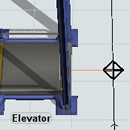 |
| エレベーターリダイレクトCP | エレベーターのリダイレクトコントロールポイントは、エレベーター搬送の要求を処理します。AGVがリダイレクトコントロールポイントを通過すると、搬送用エレベーターの取得を試みます。利用可能であれば、エレベーターフロアのコントロールポイントに到達するまで軌道を進みます。エレベーターが利用できない場合は、エレベーターが空になるまでこのコントロールポイントで待機します。 | 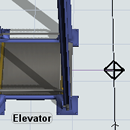 |
| エレベーターエントリCP | エレベーターエントリのコントロールポイントは、エレベーターのリダイレクトコントロールポイントに接続します。AGVが上流のエレベーターコントロールポイントを通過するときにエレベーターが利用可能でない場合、エレベーターのエントリのコントロールポイントに移動し、エレベーターが利用可能になるまで待つことができます。 | 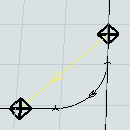 |
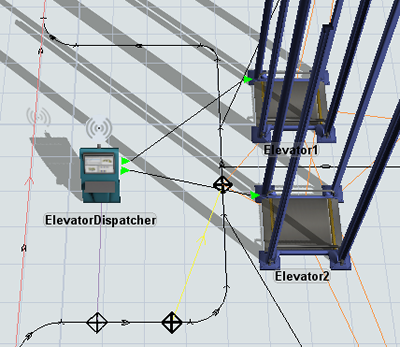
エレベーターとディスパッチャーの3Dモデルへの追加
エレベーターは、ライブラリのタスク実行者グループの下にあります。モデルに3Dオブジェクトを追加するのと同じ方法で、モデルにエレベーターを追加します。
同じエリアに複数のエレベーターを追加する必要がある場合は、ディスパッチャーも追加する必要があります。
- タスク実行者グループの下のライブラリから、エレベーターエリアにディスパッチャーを追加します。
- ディスパッチャーからエリア内の各エレベーターへのポート接続(A接続)を作成します。
AGVエレベーター処理フローテンプレートを設定する
ある時点で、AGVエレベーター処理フローテンプレートを追加して設定する必要があります。
- メインツールバーで[処理フロー]ボタンをクリックして、メニューを開きます。[タスク実行者サブフローを追加]をポイントして[AGVエレベーター]を選択します。
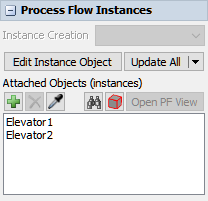
- 新しく作成した処理フローテンプレートで、何も選択されないようにするために空白の領域をクリックします。
- [処理フローインスタンス]の[クイックプロパティ]で、[添付オブジェクト(インスタンス)]ボックスを見つけます。[サンプラー]ボタン
 をクリックして、サンプリングモードに入ります。
をクリックして、サンプリングモードに入ります。 - 3Dモデルで、各エレベーターをクリックして処理フローテンプレートに添付します。
エレベーターコントロールポイントの追加と接続
フロアプランとAGVネットワークをレイアウトし、エレベーターを処理フローに接続した後、AGVをエレベーターに向かわせるためのコントロールポイントを追加する必要があります。次のセクションで説明するように、シミュレーションモデルによっては、AGVエレベーターシステムに異なる4つのタイプのコントロールポイント接続を設定する必要があります。
次の作業を検索接続
[次の作業を検索]接続は、AGVが作業を探している場合に次の目的地がどこになるかを伝えます。AGVをAGVネットワーク全体でループ移動させる場合は、コントロールポイント間にこの種の接続が必要になります。
これらの接続を作成するには:
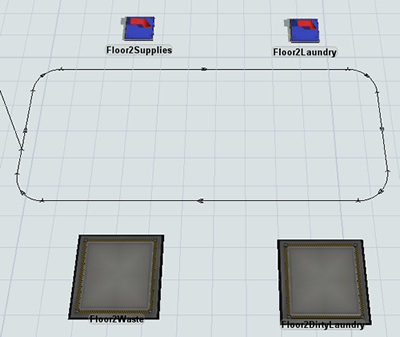
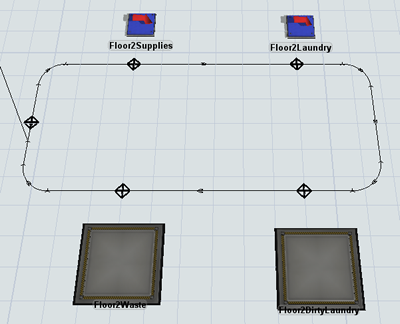
- 次の例に示すように、AGVが作業を探すために移動する上層フロアのそれぞれにルーピングAGVパスを作成します。
- 必要に応じてAGVパスに沿って複数のコントロールポイントを追加します。たとえば、パスに沿って固定リソースに接続するためのコントロールポイントを追加するとします。AGVがエレベーターに出入りするコントロールポイントを追加することもできます。
- Aキーを長押しして接続モードに入ります。接続モードになると、マウスポインターはチェーン記号が横に付いたプラス記号に変わります(
 )。
)。 - AGVがこのフロアでループを開始する際に通過する最初のコントロールポイントをクリックします。マウスを動かすと、クリックしたコントロールポイントとカーソルの間に黄色の線が表示されます。
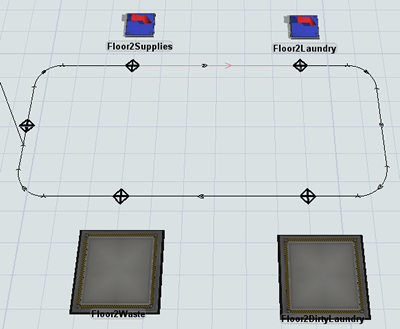
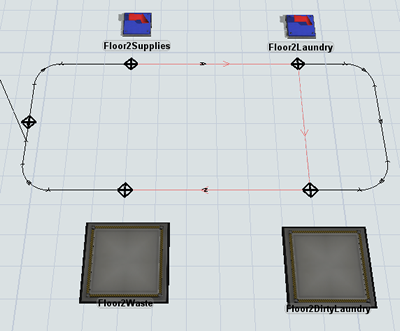
- AGVが通過する2番目のコントロールポイントをクリックしてメニューを開きます。メニューからNextLookForWorkを選択します。これら2つのコントロールポイント間に[次の作業を検索]接続があることを示す赤い線が表示されます。方向矢印がAGVが移動するパスと同じ方向を向いていることを確認してください。
- 前のステップを繰り返して、連続した[次の作業を検索]ループ内のすべてのコントロールポイントを接続します。
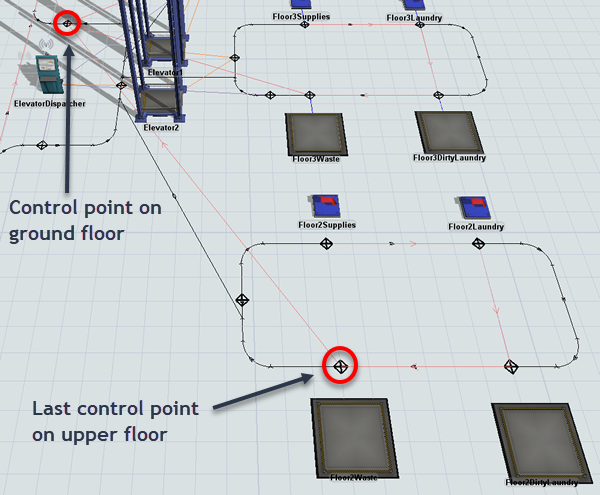
- [次の作業を検索]ループを完成させるには、このフロアのループの最後のコントロールポイントからAGVがこのフロアを出た後に移動する次のコントロールポイントまで、[次の作業を検索]ループ接続を作成する必要があります。次の例では、最後の[次の作業を検索]コントロールポイントが、1階のエレベーターを出た直後にAGVが通過するコントロールポイントに接続されています。
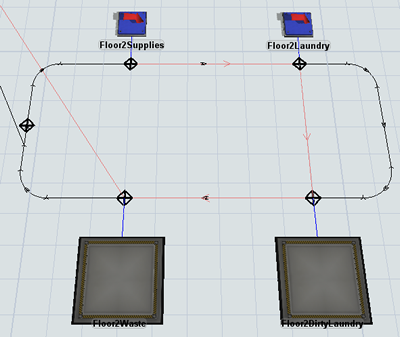
- 上層フロアの固定リソースがすべてコントロールポイントに接続されていることを確認してください。詳細については、「AGVネットワークに固定リソースを接続する」を参照してください。
エレベーターのリダイレクト接続
エレベーターのリダイレクトコントロールポイントは、エレベーター搬送の要求を処理します。AGVがリダイレクトコントロールポイントを通過すると、搬送用エレベーターの取得を試みます。利用可能であれば、エレベーターフロアのコントロールポイントに到達するまで軌道を進みます。エレベーターが利用できない場合は、エレベーターが空になるまでこのコントロールポイントで待機します。
リダイレクトコントロールポイントを設定するには:
- エレベーターエリアのエントリポイント付近にコントロールポイントを追加します。理想的には、AGVがエレベーターエリアに入ったときに通過する最初のコントロールポイントである必要があります。
- Aキーを長押しして接続モードに入ります。接続モードになると、マウスポインターはチェーン記号が横に付いたプラス記号に変わります()。
- 前の手順で追加したコントロールポイントをクリックします。マウスを動かすと、クリックしたコントロールポイントとカーソルの間に黄色の線が表示されます。
- AGVのリダイレクト先のエレベーターをクリックしてメニューを開きます。[ElevatorRedirectCP]を選択します。コントロールポイントとエレベーターを結ぶ紫色の線が表示されます。
- 上層フロアが1階と同じ平面上にあるモデルを使用している場合は、上層フロアのリダイレクトコントロールポイントをクリックして選択します。
- [クイックプロパティ]の[ラベル]グループで、[追加]ボタン
 をクリックしてメニューを開きます。新しいラベルを追加するには、[番号ラベルを追加]を選択します。
をクリックしてメニューを開きます。新しいラベルを追加するには、[番号ラベルを追加]を選択します。 - ラベルに「
floorZ」という名前を付けます。 - このフロアにAGVを送るときにエレベーターが上がるZ高さとして値を設定します。エレベーターがこのフロアにAGVを送ると、エレベーターはこのラベルで指定したZ高さまで上昇します。

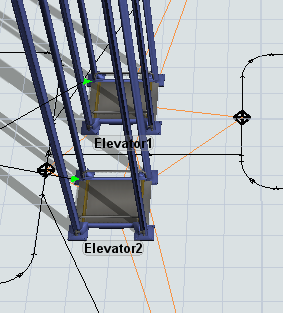
エレベーターフロア接続
エレベーターフロアのコントロールポイントは、AGVが各階のエレベーターに出入りする点になります。AGVがエレベーターフロアのコントロールポイントを通過すると、エレベーターの内側に表示されます。AGVがエレベーターを出ると、エレベーターフロアのコントロールポイントに表示されます。
エレベーターフロア接続を設定するには:
- AGVがエレベーターに出入りするAGVネットワーク上の領域にコントロールポイントを追加します。
- Aキーを長押しして接続モードに入ります。接続モードになると、マウスポインターはチェーン記号が横に付いたプラス記号に変わります()。
- 前の手順で追加したコントロールポイントをクリックします。マウスを動かすと、クリックしたコントロールポイントとカーソルの間に黄色の線が表示されます。
- AGVのリダイレクト先のエレベーターをクリックしてメニューを開きます。[ElevatorFloorCP]を選択します。コントロールポイントとエレベーターを結ぶオレンジ色の線が表示されます。
エレベーターエントリの接続
エレベーターエントリの接続はオプションです。AGVが上流のエレベーターコントロールポイントを通過するときにエレベーターが利用可能でない場合、エレベーターのエントリのコントロールポイントに移動し、エレベーターが利用可能になるまで待つことができます。
エレベーターエントリの接続を設定するには:
- エレベーターが空くのをAGVが待つべきエリアにコントロールポイントを追加します。
- Aキーを長押しして接続モードに入ります。接続モードになると、マウスポインターはチェーン記号が横に付いたプラス記号に変わります()。
- 前の手順で追加したコントロールポイントをクリックします。マウスを動かすと、クリックしたコントロールポイントとカーソルの間に黄色の線が表示されます。
- エレベーターフロアのコントロールポイントをクリックしてメニューを開きます。ElevatorEntryCPを選択します。2つのコントロールポイントを接続すると、黄色いラインが現れます。
追加フロアへのAGVパスを作成する
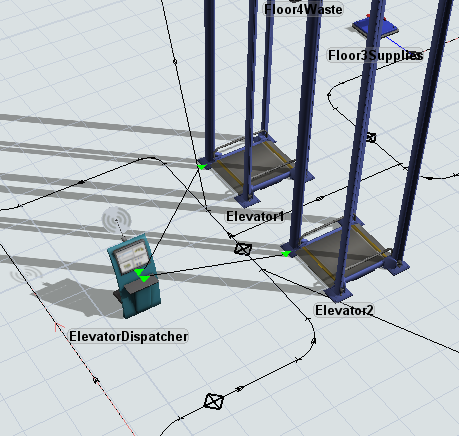
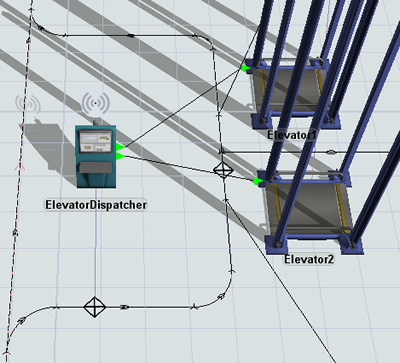
AGVネットワークは、あるフロアから別のフロアへの移動パスを検索することができなければなりません。そのため、次の画像に示すように、1階のAGVネットワークを上層フロアの各AGVネットワークに接続する双方向AGVパスを作成する必要があります。
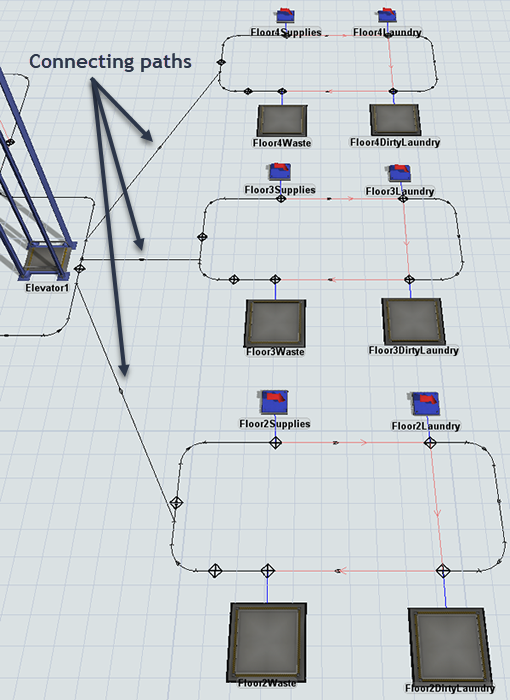
AGVは実際にはこのパスを使用して上層フロアに移動しないことに注意してください。実際、シミュレーション実行中にAGVがエレベーターの1つを使用する代わりにこのパスを移動する場合は、エレベーターコントロールポイントのロジックが正しく設定されていないことを示します。
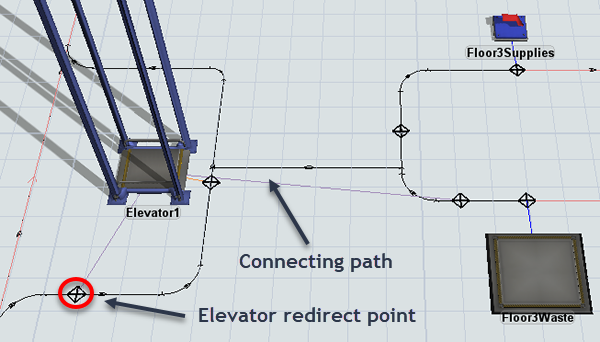
AGVがフロア間を行き来できるように、パスは双方向である必要があります。また、AGVが接続パスに到達する前に、エレベーターのリダイレクトコントロールポイントを通過するようにする必要があります。そうでない場合、AGVはエレベーターを使用せずに接続パスを移動します。3Dモデルでエレベーターの位置に比較的近いAGVネットワーク上のポイントから接続パスを作成することで、この問題を回避できる可能性があります。
たとえば、次の画像では、AGVはリダイレクトポイントを通過し、接続パスを移動する前にエレベーターに送られます。