ロボット
概要と主要な概念
ロボットは、フローアイテムを出発地から持ち上げて終点に配置する特別な輸送です。一般に、ロボットのベースは動きません。代わりに、6つのジョイントが回転してフローアイテムを移動します。

ロボットはタスク実行者です。ジョイントを回転させてオフセット移動を実行します。デフォルトでは、ロボットがオフセット移動を実行するときにロボットのx/y/z位置はまったく変化しません。目的地がロボットの最大アーム伸長より遠くにある場合、ロボットはアームをその最大伸長までしか伸ばしません。タスク実行者の標準の最大速度値、加速値、減速値は使用しません。
デフォルトでは、ロボットはロボット自身をナビゲータに接続しません。つまり、ユーザーが明示的にロボットをネットワークに接続しない限り、移動タスクを実行しません。
イベント
ロボットはすべてのタスク実行者に共通の標準イベントを使用します。これらのイベントの説明については、「タスク実行者の概念 - イベント」を参照してください。
状態
このオブジェクトはタスク実行者の状態を使用します。詳細については、「タスク実行者の概念 - 状態」を参照してください。
統計
ロボットはすべてのタスク実行者に共通の標準統計を使用します。これらの統計情報については、「タスク実行者の概念 - 統計」を参照してください。
プロパティ
ロボットオブジェクトには、さまざまなプロパティを持つ7つのタブがあります。最後の6つのタブは、すべてのタスク実行者(ディスパッチャー以外)に共通する標準タブです。これらのタブのプロパティの詳細については、以下を参照してください。
残りの2つのタブである[ロボット]タブと[ジオメトリ]タブは、ロボットオブジェクトに固有です。これらのタブのプロパティについては、次の2つのセクションで詳しく説明します。
[ロボット]タブ
[ロボット]タブには、次のプロパティがあります。
[移動時間を定義]メニュー
ロボットは、固定リソースによって作成されたタスクシーケンスにクレーンオブジェクトと同様の方法で対応します。具体的には、ロボットはFRLOAD、FRUNLOAD、TRAVELTOLOC、TRAVELRELATIVEタスクタイプに対応します。ロボットには4つのオペレーションモードがあります。ロボットがタスクに対応する方法のほか、何よりタスクの実行にかかる時間がモードによって異なります。
- 移動時間を定義 - これはデフォルトのオプションです。ここでは、コードで明示的に移動時間を定義します。
- シンプルモーション方法を使用 - このオプションでは、移動時間を決定するいくつかの基本速度入力を指定できます。
- モーションパスを定義 - 「ロボットのモーションパス」トピックで説明されている最も柔軟なオプションです。
- ジョイント速度を使用 - ここでは、ロボットのジョイントごとに速度を定義します。
その他のプロパティ
[移動時間を定義]メニューには、選択したオプションに応じて異なるプロパティが表示されます。
[ジオメトリ]タブ
[ジオメトリ]タブには、次のプロパティがあります。
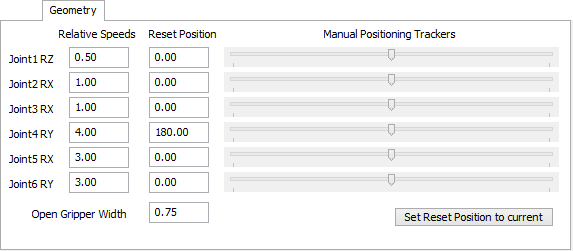
相対速度
この列のオプションは、各ジョイントの相対速度をコントロールします。
リセット位置
この列のオプションは、ロボットがリセット時に戻る位置をコントロールします。
手動位置トラッカー
この列のスライダーは、各ジョイントの現在の位置をコントロールします。
オープングリッパ幅
このオプションは、グリッパが開いているときのグリッパの開き具合をコントロールします。
リセット位置を現在の値に設定
このオプションは、ロボットの現在位置をリセット位置として保存します。