[衝突]タブ
[衝突]タブについて
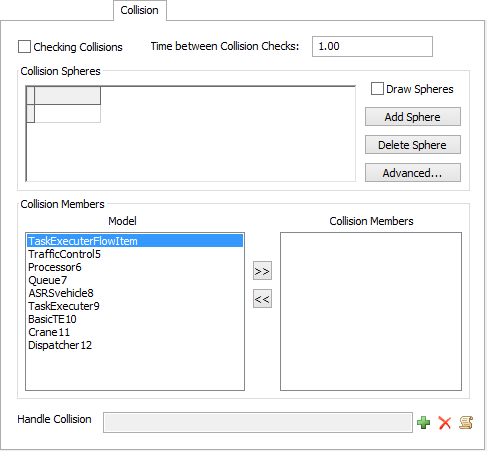
[衝突]タブでは、オブジェクトと他のオブジェクトとの潜在的な衝突を検出できます。衝突検出の仕組みの詳細については、「タスク実行者の概念 - 衝突検出」を参照してください。
衝突チェック
[衝突]タブの最初の2つのプロパティは次のとおりです。
衝突チェック
衝突メンバー間の衝突チェック間隔での衝突検出を有効にするには、このチェックボックスをオンにします。
衝突チェックの間隔
このオブジェクトの衝突チェックの間に経過するシミュレーション時間。これは、衝突メンバーの衝突チェックの間の時間を指定するものではありません。
衝突球
[衝突球]グループには、次のプロパティが含まれています。
衝突球
このテーブルは、オブジェクト上に1つ以上の衝突球を定義するために使用されます。
球を描画
CollisionObjectの周りに衝突球を表示する場合は、このチェックボックスをオンにします。
球を追加
オブジェクトに新しい球を追加するには、このボタンを選択します。球のサイズと位置はテーブルで定義します。
球を削除
テーブル内の最後の球を削除するには、このボタンを選択します。
詳細
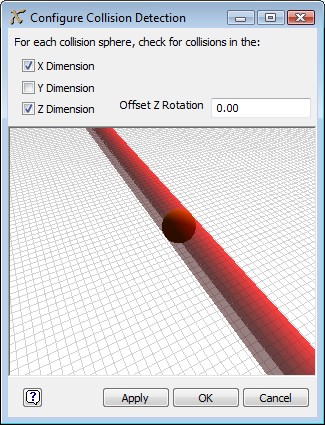
このボタンを使用すると、球の衝突を検出する際に特定の軸を除外するようにタスク実行者を構成することによって、衝突チェックの速度を最適化できます。そのようにして、より少ない球の数で、より広い検出エリアをカバーできます。ボタンを押すと下のウィンドウが開きます。特定の軸を検出から除外するには、X、Y、Z座標のチェックボックスをオフにします。構成の結果がビューに表示されます。透明な円柱または平面は、選択した構成によって衝突を起こすエリアをカバーします。正常軸と平行でない軸の衝突を検出する場合は、オフセット回転(45度など)を入力することもできます。X、Y、Z座標は、個々のオブジェクトの座標系ではなく、グローバル座標系で決まります。
衝突メンバー
[衝突メンバー]グループには、左側のタスク実行者の衝突メンバーに追加できるモデルオブジェクトのリストがあります。右側は、オブジェクトの衝突メンバーのリストです。
モデルリストのメンバーをタスク実行者のメンバーリストに追加するには、クリックして目的のオブジェクトを選択し、 ボタンをクリックします。
ボタンをクリックします。
メンバーリストからオブジェクトを削除するには、目的のオブジェクトを選択して  ボタンをクリックします。
ボタンをクリックします。
衝突を処理する
[衝突を処理する]ピックリストを使用すると、ユーザーは衝突が発生したときの動作を定義できます。