[タスク実行者]タブ
[タスク実行者]タブは、タスク実行者によるシミュレーションモデル内のフローアイテムの処理方法を制御します。
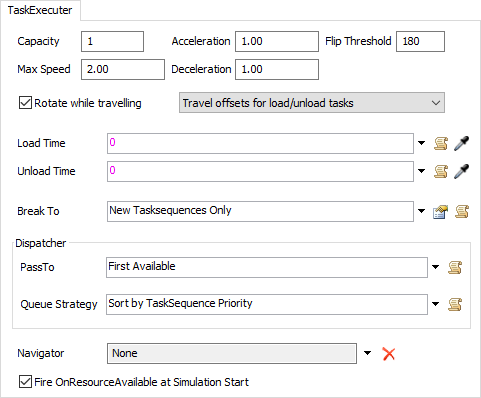
[タスク実行者]タブには、次のプロパティがあります。
容量
この数値は、タスク実行者が所定時間に実行できるフローアイテムの最大数です。
最大速度
タスク実行者が移動できる最大最速です。
加速度
この数値は、タスク実行者の加速値です。最高速度に達するか、目的地ノードに到達するために減速が必要になるまで加速します。
減速
この数値は、タスク実行者が目的地に近づく際に減速する速度です。
反転しきい値
トランスポーター/オペレーターと目的地ノードとの間の角度がこの値以上になると、正しい方向に向くようにトランスポーター/オペレーターが反転(鏡像)します。このオプションは、オンまたはオフのいずれでもモデルの統計には影響しません。これは単に視覚化のためのものです。
移動中に回転
このチェックボックスをオンにすると、移動方向を向くようにトランスポーター/オペレーターが必要に応じて回転します。チェックボックスがオフの場合は、常に同じ方向を向きます。このオプションは、オンまたはオフのいずれでもモデルの統計には影響しません。これは単に視覚化のためのものです。
ロード/アンロードタスクのオフセットを移動
このボックスには、次のオプションがあります。
- ロード/アンロードタスクのオフセットを移動 - 選択すると、トランスポーター/オペレーターは、フローアイテムがピックアップまたはドロップオフされた地点に移動します。
- ロード/アンロードタスクのオフセットを移動しない - 選択すると、トランスポーター/オペレーターは目的地オブジェクトの原点まで移動し、そこでフローアイテムをピックアップまたはドロップオフします。トランスポーター/オペレーターがネットワークノードを使用して目的地まで移動する場合、目的のオブジェクトにアタッチされたネットワークノードに移動し、そこで停止します。
- オフセットを移動したり、ネットワーク上のスペースをブロックしたりしない - このオプションは、トランスポーター/オペレーターが不通過パスのネットワークに接続されている場合にのみ適されます。選択すると、トランスポーター/オペレーターはノードに到着して移動を終了し、ロード/アンロードオペレーションの実行中も、ネットワーク上のスペースを使い続け、パス上を移動する他のトランスポーター/オペレーターをブロックします。
- オフセットの移動にはナビゲータを使用 - 選択すると、トランスポーター/オペレーターは、割り当てられたナビゲータを使用して、場所に移動、移動関連、ロード/アンロードといったオフセット移動タスクを実行します。
ロード時間
このピックリストは、このオペレーターまたはトランスポーターがフローアイテムをロードするのにかかる時間を返します。
アンロード時間
このピックリストは、このオペレーターまたはトランスポーターがフローアイテムをアンロードするのにかかる時間を返します。
中断先の要件
このフィールドは、タスク実行者が中断タスクまたはcallsubtasksタスクに到達すると実行されます。戻り値はタスクシーケンスに参照されます。このフィールド内のロジックでは、タスク実行者のタスクシーケンスキューを検索し、中断先として適切なタスクシーケンスを見つける必要があります。
ディスパッチャーパス先
このピックリストは、タスクシーケンスの送付先となる出力ポート番号を返します。0が返された場合、タスクシーケンスは、下に示されているキュー方法を使用してキューに入り、使用可能な最初のモバイルリソースに送付されます。-1が返された場合、ディスパッチャーは何も行いません。そのような場合は、TaskSequence.dispatch()メソッドとTaskSequence.move()メソッドを使用して、ディスパッチロジックを自分で実行します。
ディスパッチャーキューの方法
このピックリストは、オブジェクトのタスクシーケンスキュー内でそれをランク付けするために使用されるタスクシーケンスの「優先度」値を返します。デフォルトでは、作成時にタスクシーケンスに与えられた優先度値を返しますが、ユーザーはこのフィールドでタスクシーケンスの優先度をカスタマイズすることもできます。
ナビゲータ
タスク実行者オブジェクトが使用するナビゲータを指定します。モデル内でナビゲータが使用できる場合、ドロップダウンに表示されます。ナビゲータを使用してタスク実行者を削除するには、[削除]ボタン  を押します。
を押します。
モデル内のオブジェクトに応じて、さまざまなナビゲータが利用可能です。以下は、これらのナビゲータとその目的のリストです。
- なし - [なし]に設定すると、タスク実行者は現在の位置から終了位置まで直線移動して移動タスクを実行します。また、必要に応じて直線をオフセット移動し、フローアイテムをピックアップします。
- DefaultNetworkNavigator - DefaultNetworkNavigatorは、ネットワークノードをモデルに追加した場合に使用できます。A接続を使用してタスク実行者をNetworkNodeに接続すると、ナビゲータが自動でDefaultNetworkNavigatorに設定されます。DefaultNetworkNavigatorは、モデル内のすべてのネットワークノードの距離/ルーティングテーブルを構築します。タスク実行者に移動タスクが与えられると、ナビゲータは、最終目的地までの最短パスを通ってタスク実行者をNetworkNodeからNetworkNodeに移動させます。
- AGVNetwork - AGVパスがモデルに追加されていると、AGVNetworkを使用できます。AGVネットワークを使用するタスク実行者は、AGVネットワークプロパティのプロパティ設定に基づいてAGVパスに沿って移動します。
- AStarNavigator - AStarナビゲータがモデルに追加されていると、AStarNavigatorを使用できます。AStarNavigatorに接続すると、タスク実行者は、途中にあると考えられる仕切りや障壁を考慮し、現在の位置から最終目的地までの最短パスを移動します。
シミュレーション開始時にOnResourceAvailableを起動
オンにすると、シミュレーション開始時にオブジェクトのOnResourceAvailableトリガーを起動します。