Robot
Overview and Key Concepts
The robot is a special transport that lifts flow items from their starting locations and places them at their ending locations. Generally, the robot's base does not move. Instead, 6 joints rotate to move the flow items.

The robot is a task executer. It implements offset travel by rotating its joints. Note that by default, the x/y/z location of the robot does not change at all when it does offset travel. If the destination location is further away than the robot's maximum arm extension, then the robot will only extend its arm up to its maximum extension. It does not use the standard task executer maximum speed, acceleration and deceleration values.
The robot by default does not connect itself to a navigator, which means that it does not execute travel tasks unless you explicitly connect it to a network.
Events
The robot uses the standard events that are common to all task executers. See Task Executer Concepts - Events for an explanation of these events.
States
This object uses the task executer states. See Task Executer Concepts - States for more information.
Statistics
The robot uses the standard statistics that are common to all task executers. See Task Executer Concepts - Statistics for an explanation of these statistics.
Properties
The robot object has seven tabs with various properties. The last six tabs are the standard tabs that are common to all task executers (except the dispatcher). For more information about the properties on those tabs, see:
- The Task Executer Tab
- The Breaks Tab
- The Collision Tab
- The Triggers Tab
- The Labels Tab
- The General Tab
The remaining two tabs, the Robot tab and the Geometry tab are unique to the robot object. The properties on these tabs will be explained in more detail in the next two sections.
The Robot Tab
The Robot tab has the following properties:
Define Move Time Menu
The robot responds to task sequences created by fixed resources much like the Crane object, more specifically the robot responds to FRLOAD, FRUNLOAD, TRAVELTOLOC and TRAVELRELATIVE task types. The robot has 4 modes of operation, each mode changes the way the robot responds to a task and more importantly how long it takes to perform the task.
- Define Move Time - This is the default option. Here you define a move time explicitly with code.
- Use Simple Motion Method - This option allows you to provide a few basic speed inputs that determine the move time.
- Define Motion Paths - The most flexible option, explained in the Robot Motion Paths topic.
- Use Joint Speeds - Here you define a speed for each of the robot's joints.
Additional Properties
The properties that are below the Define Move Time menu will vary depending on which option you selected.
The Geometry Tab
The Geometry tab has the following properties:
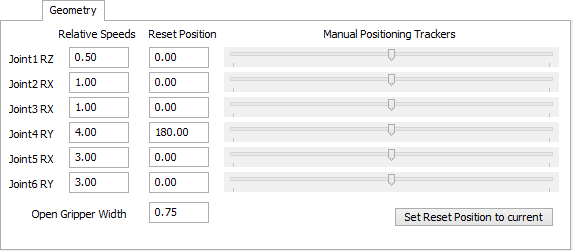
Relative Speeds
The options in this column control the relative speeds for each joint.
Reset Position
The options in the column control the position to which the robot will return on reset.
Manual Positioning Trackers
The sliders in this column control the current position of each joint.
Open Gripper Width
This option controls how far open the gripper is when it's open.
Set Reset Position to current
This option saves the current position of the robot as its reset position.