Crane
Overview and Key Concepts
The crane has similar functionality to the transporter but with a modified graphic. The crane works in a fixed space following rectangular x,y,z movements. It is designed to simulate rail-guided cranes such as gantry, overhead, or jib cranes. By default, the crane picker rises to the height of the crane object after picking up or dropping off a flow item before it will travel to the next location. To exercise more control over the movements of the picker from one pickup to the next, change the crane's travel sequence in its Properties window.

The crane is a task executer. It implements offset travel according to a travel sequence that the user specifies. By default, this travel sequence is L > XY > D. The > character separates travel operations, L means lift the hoist, X means move the gantry, Y means move the trolley, and D means drop the hoist to the offset position. The default travel sequence tells the crane to first lift the hoist, then move the gantry and trolley simultaneously to the offset position, then drop the hoist. The crane travels so that its x/y center and z base arrive at the destination location. If there is an involved flow item for the offset travel task, then the crane travels so that its x/y center and z base arrive at the top of the flow item, or in other words, it increases the arrival z location by the z size of the flow item.
Events
The crane uses the standard events that are common to all task executers. See Task Executer Concepts - Events for an explanation of these events.
States
This object uses the task executer states. See Task Executer Concepts - States for more information.
Statistics
The crane uses the standard statistics that are common to all task executers. See Task Executer Concepts - Statistics for an explanation of these statistics.
Properties
The crane object has seven tabs with various properties. The last six tabs are the standard tabs that are common to all task executers (except the dispatcher). For more information about the properties on those tabs, see:
- The Task Executer Tab
- The Breaks Tab
- The Collision Tab
- The Triggers Tab
- The Labels Tab
- The General Tab
Only the Crane tab is unique to the crane object. The properties on this tab will be explained in more detail in the following sections.
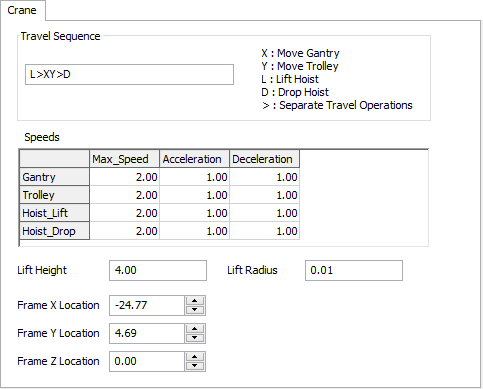
Travel Sequence
Here you can specify the order in which the crane performs travel operations.
Speeds Table
Here you specify the max speed, acceleration and deceleration for each of the 4 operations the crane will do. Note that these operations only apply to offset travel. If the crane is connected to a network, then when it is on the network, only the normal maxspeed, acceleration and deceleration specified in the Task Executer tab will be used.
Lift Height
Here you define how high the crane will lift to get to its lift height.
Lift Radius
Specify a radius within which the crane will not do a lift operation.
Frame X/Y/Z Location
These numbers define the location of the crane's frame. Note that this is different than the cranes actual x/y/z location. The crane's x/y/z location describes the location of the moving part of the crane. The frame will be stationary throughout the simulation, while the actual x/y/z location of the crane changes as the crane travels.