The Collision Tab
About the Collision Tab
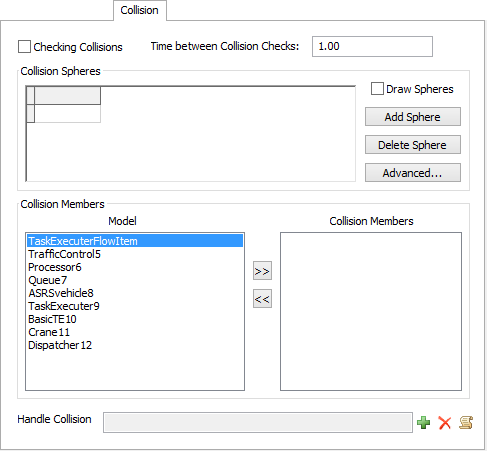
The Collision tab helps an object detect potential collisions with other objects. See Task Executer Concepts - Collision Detection for more information about how collision detection works.
Checking Collisions
The first two properties on the Collision tab are as follows:
Checking Collisions
Check this box to turn on collision detection. time between its collision members' collision checks.
Time between Collision Checks
The simulation time that passes between this object's collision checks. This does not specify the time between its collision members' collision checks.
Collision Spheres
The Collision Spheres groups contains the following properties:
Collision Spheres
This table is used to define one or more collision spheres on the object.
Draw Spheres
Check this box if you want the collision spheres visible around the CollisionObject.
Add Sphere
Select this button to add a new sphere to the object. Define the size and position of the sphere in the table.
Delete Sphere
Select this button to delete the last sphere in the table.
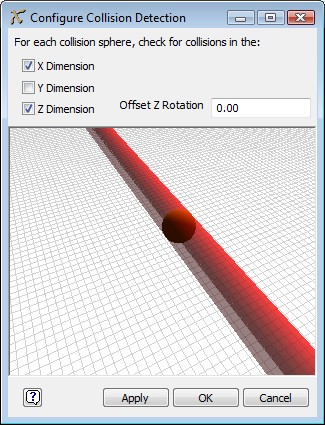
Advanced
This button allows you to optimize for collision checking speed by configuring the Task Executer to exclude certain axes when checking its spheres for collisions. This let's you cover more checking area with less spheres. Pressing the button opens the window below. Uncheck the X, Y, and/or Z Dimensions to exclude certain axes in the check. The result for your configuration is drawn in the view. A transparent cylinder or plane covers areas that will cause a collision given the configuration you've chosen. You can also enter an offset rotation, like 45 degrees, if you want to check for collisions on an axis that is not parallel with the normal axis. Note that the X, Y, and Z dimensions are according to the global coordinate system, and not according to the individual object's coordinate system.
Collision Members
The Collision Members group contains a list of model objects that can be added to the Task Executer's collision members on the left. On the right is the list of collision members for the object.
To add a member from the model list to the Task Executer's member list, select the object
you want by clicking on it and then click on the  button.
button.
To remove an object from the member list, select the one you want and click on the
 button.
button.
Handle Collision
The Handle Collision picklist allows the user to define what happens when a collision takes place.