Straight and Curved Path
Overview and Key Concepts
AGV Paths define the routes that AGVs take to get to their destinations on the AGV network.
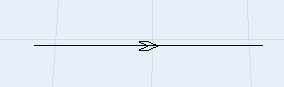
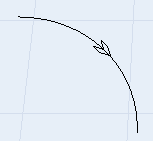
Straight vs Curved
A Path can either be a straight path:
Or a curved path:
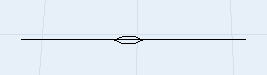
One-Way vs Two-Way
A Path can either be one-way:
Or two-way:
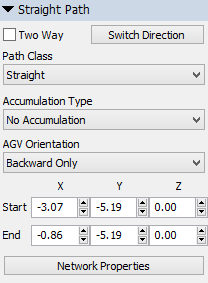
AGV Orientation
You can also force a single AGV orientation for a path. This defines how the AGV must face while on the path, irrespective of the AGV's travel direction. The default is any, meaning the AGV may face any direction while on this path. You can define it as forward-only:
Or backward-only:
Think of the half-square as an outline of the AGV's front end. Paths with a defined AGV orientation can be two-way, but the Forward/Backward-ness of the AGV Orientation is relative to the direction the Path would be if it were one-way.
Usually you can enforce proper AGV orientation simply by building the path network correctly. However, in some cases this is not possible, hence you have the option to enforce it explicitly. Note that choosing an AGV orientation on any path in your network will cause a non-trivial amount of extra memory to be allocated to build routing tables for each AGV orientation, and if you haven't built your network properly it may cause routing failures because the network can't find a path that will get the AGV to the destination with the proper orientation. Hence it is advisable to only use this option if it is explicitly needed.
Path Classes
Path Classes allow you to break out AGV speeds by path.
Accumulation Types
Each path can have an Accumulation Type assigned to it. If defined (not No Accumulation), AGVs traveling on that path will detect proximity with each other and avoid collisions. You can define Accumulation Types in the AGV Network's Accumulation Types tab.
Properties
Paths do not have a traditional properties window. Instead you access their properties through Quick Properties.