Control Point
Overview and Key Concepts
Control Points are points on the AGV network where various decision logic happens.
A control point may be:
- A point where AGVs pick up and/or drop off flow items.
- A stopping point on the network where AGVs wait to enter an area or section of a path.
- A decision point on the network where the AGV looks for work to do.
- A decision point on the network where an AGV is dispatched to some other point on the network, dependent on network state/availability.
Control Point Allocation/Deallocation
Control Points act as allocation/deallocation points on the network. AGVs automatically look ahead to their next control point and must allocate that control point before proceeding on the network.
Way Points
Control Points can be members of way points.
Events
For information on events, see the Event Listening page.
The control point has the following events:
On Allocated
Fired when the Control Point is allocated by an AGV.
It has the following parameters:
| Event Parameter | Type | Explanation |
|---|---|---|
| AGV | Object | The task executer that allocated the control point. |
On Arrival
Fired at an AGV's arrival at the control point, i.e. when the AGV has decelerated to stop at the control point, either because it could not allocate further ahead or if the control point is the final destination.
It has the following parameters:
| Event Parameter | Type | Explanation |
|---|---|---|
| AGV | Object | The task executer that arrived at the control point. |
On Deallocated
Fired when the Control Point is deallocated by an AGV.
It has the following parameters:
| Event Parameter | Type | Explanation |
|---|---|---|
| AGV | Object | The task executer that deallocated the control point. |
On Entry
Fired when an object (usually a flow item) is moved into the control point.
It has the following parameters:
| Event Parameter | Type | Explanation |
|---|---|---|
| Item | Object | The item that entered the control point. |
On Exit
Fired when an object (usually a flow item) is moved out of the control point.
It has the following parameters:
| Event Parameter | Type | Explanation |
|---|---|---|
| Item | Object | The item that is exiting the control point. |
On Pre Arrival
Fired at an AGV's pre-arrival to the control point, i.e. the point at which the AGV would start to decelerate to stop at the control point if needed. On Pre Arrival is fired prior the AGV allocating further ahead or when the AGV starts decelerating to its final destination.
It has the following parameters:
| Event Parameter | Type | Explanation |
|---|---|---|
| AGV | Object | The task executer that is about to arrive at the control point. |
States
The control point does not implement any states.
Statistics
The control point tracks the following statistics:
AllocationCount
The total number of AGVs who have allocated the control point. Usually this will either be 0 or 1, unless you set the control point's Max Allocations to be greater than 1.
Properties
Control Points do not have a traditional properties window. Instead, properties are defined through the Quick Properties window.
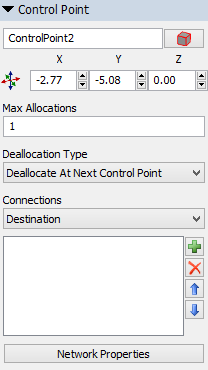
Max Allocations
The maximum number of AGVs that can simultaneously claim the Control Point.
Deallocation Type
The Control Point's assigned Deallocation Type.
Connections
Here you can view, add, remove, and re-order Control Point Connections.