AGVタイプ
概要と主要な概念
FlexSimのAGVシステムでは、AGVタイプを使用してAGVの1つ以上のタイプを定義することができます。これは、通常、AGVの特定のメイクおよびモデルと相関関係にあります。各AGVタイプは、そのタイプのAGVの以下の動作を定義します。- 加速度
- 減速度
- 順方向最大速度
- 逆方向最大速度
- バッテリー容量
- バッテリー減少率
- バッテリー再充電率
- 回転動作
- トレーラー接続動作
テーブルを使用してこれらのさまざまな値を入力します。このテーブルでは、最大速度属性がパスクラスとロードタイプの両方で分類されていますが、加速度、減速、およびバッテリー減少属性がロードタイプで分類されます。
複数のAGVタイプを定義する場合は、AGVとAGVタイプをどのように関連付けるかを指定する必要があります。これを行うには、3DビューでAGVをクリックしてから、[AGV トラベラー]プロパティパネルで[AGVタイプ]を指定します。
[AGVタイプ]タブ
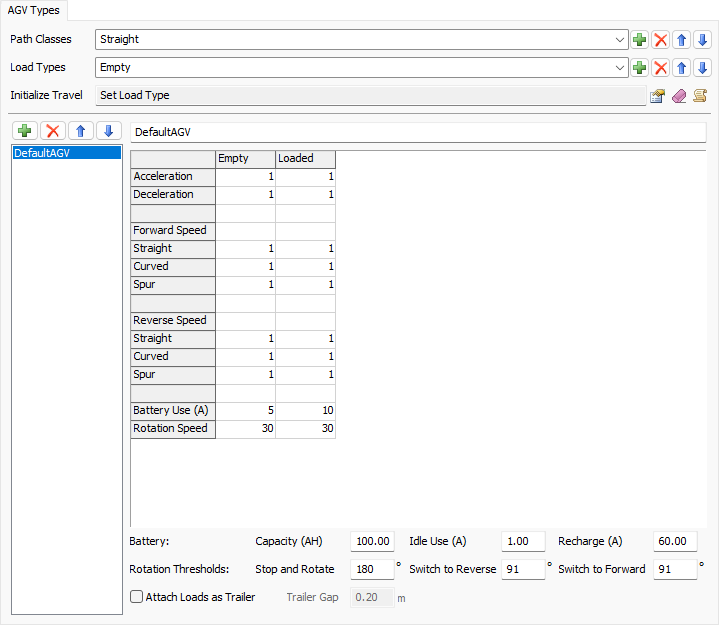
[AGVタイプ]タブには次のプロパティがあります。
パスまたはコントロールポイントを右クリックし、[AGVネットワークプロパティ]を選択すると、[AGVタイプ]ページが表示されます。
パスクラス
ここでは、モデルのパスクラスのセットを追加、削除、並べ替え、および名前変更できます。パスクラスは、主に、パスでAGV最大速度を分類するために使用されます。パスクラスを追加すると、順方向速度と逆方向速度の両方に関して、そのパスクラスに関連付けられた新しい速度行が各AGVタイプテーブルに追加されます。
ロードタイプ
ここでは、モデルのロードタイプのセットを追加、削除、並べ替え、名前変更できます。ロードタイプは、AGVで運ぶもののカテゴリをユーザーが定義した一覧です。これにより、AGVの現在のロードでAGV速度を分類できます。ロードタイプは、[移動を初期化]フィールドを介して、各移動オペレーションの始まりで解決されます。
移動を初期化
これは各移動オペレーションの始まりで起動するトリガーです。このトリガーの主な目的はAGVの現在のロードタイプを設定することです。
AGVタイプリスト
ここでは、モデルのAGVタイプの一覧を追加、削除、並べ替え、名前変更できます。
AGVタイプ仕様テーブル
AGVタイプ仕様テーブルでは、パスクラス、ロードタイプ、AGV方向、加速、減速、非アイドルバッテリー使用量、回転速度ごとに最大速度を定義します。
バッテリーレベルと使用方法
各AGVタイプには、バッテリー容量(アンペア時間)、アイドルバッテリー使用量(アンペア)、充電率(アンペア)が定義されています。さらに、各AGVタイプには、非アイドルバッテリー使用量(アンペア)がロードタイプごとに分類されています。各AGVはその最大バッテリー容量でシミュレーションを開始し、シミュレーションの間、バッテリー使用量を追跡します。アイドル状態になると、そのアイドル状態のバッテリー使用量が適用されます。移動オペレーションを行う際のバッテリー使用量は常にその時のロードタイプに基づきます。AGVに充電を設定すると、完全に充電されるか、その次の移動オペレーションが始まるまでその充電率で充電されます。バッテリーレベルを問い合わせる、充電を始める、バッテリーレベルを手動で設定するなどの方法については、agvinfo()コマンドのドキュメントを参照してください。
[停止および回転]のしきい値
[停止および回転]のしきい値では、AGVを停止して上のテーブルで定義された回転速度で移行先のパスの方向まで回転させる場合の基準となるしきい値を定義します。方向の違いがこのしきい値より大きい場合、AGVは停止し、回転します。そうでない場合は停止せず、パスに向かってそのまま進みます。最新の自律移動ロボット(AMR)のように「小回りの利く」AGVの場合、この値を180未満にする必要があります。それ以外の場合は、この値を180度のままにし、急旋回の必要のないパスを定義する必要があります。
[前進/リバースに切替]のしきい値
AGVが移動方向を逆にする角度しきい値を度数で定義します。AGVは、あるパスから別のパスに移動するとき、各パスの移動方向の違いをチェックします。新しいパスに移るときにこの角度を超える方向転換が必要になる場合、AGVは停止し、方向を逆にしてからパスを進みます。
このしきい値が180度を超える場合、通常であれば停止後に逆方向に進む状況であっても、AGVは常に順方向に進むことになります。AGVを所定の回転速度で方向転換させ、進むべき方向に向けるには、このしきい値を回転しきい値と組み合わせて使用する必要があります。
指定できるしきい値には2種類あり、1つは逆方向(リバース)への切り替え、もう1つは順方向(前進)への切り替えです。両者が異なる場合、AGVはどちらかの方向への移動を「優先」します。AGVに順方向への移動を優先させたい場合、[前進に切替]しきい値を[リバースに切替]しきい値より小さくします。そうすると、AGVは逆方向に移動した後、順方向への移動に簡単に切り替えられるようになります。
トレーラーを接続する
ロードされたアイテムをAGVにAGVのトレーラーとして接続することもできます。これにより、ロードされたアイテムは、AGVで運ばれる代わりに、AGVの後ろについてそのパスを進みます。[ロードをトレーラーとして添付]ボックスを選択し、[トレーラーギャップ]を定義します。トレーラーギャップは、AGVの後ろと牽引するアイテムの前までの間のギャップの距離です。