コンベヤロジックを作成する
コンベヤロジックの概要
このトピックでは、コンベヤオブジェクトを使用してさまざまなタイプのフローロジックを作成する方法について説明します。ここでは、最も一般的に作成されるコンベヤシステムについて説明します。このセクションを読む前に、「コンベヤについての主要な概念」トピックで説明されている概念について理解しておいてください。
コンベヤロジックオブジェクトを使用する
決定点、ステーション、フォトアイはコンベヤロジックのコントロールに関連する主なコンベヤオブジェクトです。このガイドでは、説明を簡単にするためにこれらの3つのタイプのオブジェクトをコンベヤロジックオブジェクトと呼びます。
これらのオブジェクトを使用するには、最初にいずれかのオブジェクトをコンベヤに追加する必要があります。オブジェクトがフローアイテムに対してコンベヤ上で何か(別のコンベヤラインへのアイテムの分岐、アイテムの遅延や処理、アイテムのラベルの変更など)を発生させるポイントにあることを確認します。
次に、オブジェクトのプロパティを開き、必要なロジックを適切なトリガーに適用します。3つのコンベヤロジックオブジェクトにはすべて、事前にプログラムされた一般的なロジックをいくつかシミュレーションする一連のピックリストオプションがあります。これらのピックリストを使用することも、FlexScriptで独自のカスタムロジックを作成することもできます。
たとえば、アイテムを機械的に90度回転させて正しい方向に調整するコンベヤ上のフリッパをシミュレーションする必要があるとします。決定点を使用してこのロジックをシミュレーションし、[アイテムを回転]ロジックを使用するように[到着時]トリガーを設定します。
決定点、フォトアイ、ステーション間で相互参照し、フローアイテムや情報を相互に送信できるように、決定点、フォトアイ、ステーション間にポート接続を作成することもできます。
たとえば、フローアイテムの30%を異なるコンベヤにランダムに分岐するとします。このロジックは2つの決定点を使用してシミュレーションできます。1つはメインコンベヤライン上に、もう1つは分岐コンベヤライン上に配置します。次に、2つの決定点の間にポート接続(A接続)を作成します。その後、最初の決定点で[到着時]トリガーを設定し、[アイテムを送る]ロジックを使用してフローアイテムの30%を2番目の決定点に分岐します。
使用すべきコンベヤロジックオブジェクト
すべてのコンベヤロジックオブジェクトに同じ論理的な基本機能があり、フローアイテムが通過するときに、事前にプログラムされたロジックまたはカスタムロジックを実行できるトリガーが含まれています。ただし、決定点、ステーション、フォトアイには、知っておくべき若干の違いがあります。
- トリガー - 一部のオブジェクトでトリガーの名前が少し異なります。また、これらのトリガーはシミュレーション中のさまざまなタイミングで起動します。決定点とステーションには[到着時]トリガーと「続行時」トリガーがあり、フォトアイには[ブロック]トリガーと[クリア時]トリガーがあります。
- 処理時間 - 決定点とステーションはほとんど同じですが、ステーションには3Dプロセッサオブジェクトに類似するその他の機能がいくつか追加されています。処理時間を追加したり、オペレーターを必須としたり、ステーションでアイテムを処理すべき(または処理すべきでない)条件を指定したりできます。ステーションには、追加の[処理完了時]トリガーもあります。
- ギャッピングロジック - フォトアイには、コンベヤにフローアイテムのバックアップがある場合など、ブロックまたはクリアされる条件に対応する機能があります。フォトアイがブロックまたはクリアされたと見なされるまで、フォトアイをカバーまたはアンカバーする必要のある期間を決定する条件を設定することもできます。フォトアイがブロック状態またはクリア状態のときに、フォトアイの角度やビジュアルカラーなどを設定することもできます。
コンベヤシステムに必要な機能に基づいて、適切なコンベヤロジックオブジェクトを使用してください。
追加のコンベヤロジックオブジェクト
統合コントローラーとモーターオブジェクトはコンベヤロジックでも重要ですが、これについては以下のセクションで詳しく説明します。統合コントローラーは、主にスラッグ構築コンベヤを統合するときに使用します(詳細については、「統合する」を参照)。モーターはパワー&フリーシステムや、複数のコンベヤを接続し、同じ速度で動作させて同時にオン/オフを切り替え可能にする場合に便利です(詳細については「パワー&フリーシステム」を参照)。
トリガーピックリストオプションの概要
次のテーブルは、コンベヤロジックオブジェクトのトリガーで使用できる、事前にプログラムされたピックリストオプションの一部の概要を示しています。
| 名前 | 説明 |
|---|---|
| アイテムを送る | 指定した条件に基づいて、さまざまな目的地(異なるコンベヤラインなど)にアイテムを送信できます。詳細については、「並べ替える」のセクションを参照してください。 |
| 停止/再開 | コンベヤモーターを停止または再開する条件を設定できます。詳細については、「モーターを停止または始動する」のセクションを参照してください。 |
| アイテムの停止と遅延 | アイテムを停止または遅延させることができます。 |
| エリア制限 | コンベヤの制限エリアで一度に流れるアイテムを固定した数のみ許可するエリアを作成できます。詳細については、「エリア制限」を参照してください。 |
| 移動 | コンベヤの特定のポイントでアイテムを回転、傾斜、移動できます。詳細については、「フローアイテムの移動」を参照してください。 |
| コンベヤ速度を設定 | 特定の条件に基づいてコンベヤの速度を変更できます |
並べ替え
コンベヤシステムは、特定の条件に基づいてさまざまな目的地にアイテムを輸送する必要がある場合に並べ替え(仕分け)を使用します。FlexSimで仕分けコンベヤシステムをシミュレーションするには、コンベヤロジックオブジェクト(決定点、ステーション、フォトアイ)を使用する必要があります。これらのオブジェクトには、特定の条件に基づいてアイテムを並べ替え、各ポート接続を介してさまざまな目的地にアイテム送信できる[アイテムを送る]という事前にプログラムされたピックリストオプションがあります。
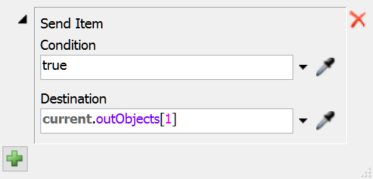
[アイテムを送る]ピックリストオプションには、アイテムを並べ替える方法を決める2つのプロパティがあります。
- 条件 - このプロパティは「このアイテムを分岐すべきかどうか」を決定し、特定の条件に基づいてアイテムを並べ替えます。
- 目的地 - このプロパティは「条件が満たされた場合に、どの目的地にアイテムを送るべきか」を決定し、定義した条件に基づいて複数の目的地にアイテムを並べ替えます。このプロパティは通常、別のコンベヤロジックオブジェクト、または出力ポートに接続された転送を指します。
これらの2つのプロパティで異なる設定の組み合わせを使用して、複雑な並べ替えロジックをコンベヤに構築できます。
以下のセクションでは、FlexSimで構築できる一般的な仕分けシステムについて説明します。
条件付き並べ替え
コンベヤは、単純な真または偽の条件に基づいてフローアイテムを並べ替えることができます。フローアイテムが[アイテムを送る条件]プロパティの条件を満たすと、コンベヤロジックオブジェクトの出力ポートに分岐されます。
たとえば、次の画像に示すコンベヤシステムでは、フローアイテムの30%が条件を満たし、代替のコンベヤラインに分岐されます。最初の決定点の[到着時]トリガーに、[アイテムを送る]ピックリスト動作が割り当てられます。条件プロパティはこの時間の真の値30%をランダムに返すように設定されています。真の値が返されると、フローアイテムは分岐コンベヤラインに送られます。
目的地を基準とした並べ替え
コンベヤは目的地に基づいてフローアイテムを並べ替えることもできます。[アイテムを送る目的地]プロパティは、オブジェクトへの参照を返します。このオブジェクトは、コンベヤロジックオブジェクトまたはアイテムの現在のコンベヤで出口の転送である必要があります。
たとえば、次の画像に示すコンベヤシステムでは、フローアイテムはフローアイテムのタイプラベル番号と一致するコンベヤに送られます。フローアイテムには5つの異なるタイプ(それぞれ色が異なる)があります。最初の決定点の[到着時]トリガーに、[アイテムを送る]ピックリスト動作が割り当てられます。[目的地]プロパティはアイテムのタイプラベルを評価し、その番号に一致する出力ポートにアイテムを送ります。
固定リソースの並べ替え
[アイテムを送る]ピックリストを使用してアイテムを並べ替えてコンベヤに送るのと同じ方法で、アイテムを下流の固定リソースに送ることもできます。
たとえば、次の画像に示すコンベヤシステムは、前のセクションのシミュレーションモデルに似ています。ただし、最後のコンベヤには、タイプラベルに基づいて特定の出口の転送に接続されたキューにアイテムを送る決定点があります。
統合する
統合コンベヤでは、複数のインフィードコンベヤラインから流れてくるアイテムを整理できます。統合の最も一般的な目的は、複数のコンベヤラインからのアイテムを1つのラインにまとめることです。それから、次の処理のためにアイテムを下流に送ります。このセクションでは、FlexSimコンベヤオブジェクトを使用してさまざまなタイプの統合を作成する方法について説明します。アイテムを統合する際に使用される可能性のある集積方法についても説明します。
基本的な統合
コンベヤラインをまとめてスナップし、コンベヤロジックオブジェクトを使用して簡単な統合を作成できます。
スラッグを構築する
コンベヤ業界では、コンベヤに集積され、最終的に1つのグループとして下流にリリースされるアイテムのキューをスラッグという用語で表します。アイテムのスラッグを構築することで、高速のスループットを維持しながら、機器の速度を可能な限り遅く保つことができます。
スラッグを構築し、次のような特定の条件セットに基づいてリリースまで待機するコンベヤを設計できます。
- スラッグのリリース準備が完了するまでに充填する必要があるコンベヤの割合
- スラッグのリリース準備が完了するまでにコンベヤ上に必要なアイテムの数
- スラッグのリリース準備が完了するまでにスラッグ構築にかかる時間
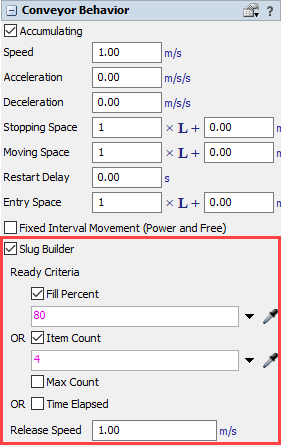
たとえば、次の画像では、このシステムの各コンベヤはリリースされる前に少なくとも4つのアイテムのスラッグを構築するように設定されています。
コンベヤのプロパティで、次を実行します。
- [スラッグビルダー]チェックボックスをオンにして、スラッグの構築を有効にします。
- 次に、[準備完了の条件]で、スラッグが完了してリリース準備が完了したことを決定する際にコンベヤで使用する条件の横にあるチェックボックスをオンにします。
統合コントローラーを使用した鋸歯状の統合
統合コントローラーオブジェクトは、ギャップを減らし、統合コンベヤに移動するスラッグ間の衝突を防止するために使用できます。そのロジックは2つの主なプロパティ、1)リリース方法、2)レーンクリアテーブルで定義されます。これら2つのプロパティは、統合レーンの優先度を決定する方法を決定します。
![]()
リリース方法には、ラウンドロビンロジックまたは最初に利用可能なロジックという事前にプログラムされた2つのオプションがあります。FlexScriptに使い慣れている場合は、カスタムリリース方法を作成することもできます。
レーンクリアテーブルは統合のジャムを防ぎ、スラッグリリース間のギャップを短くします。行と列は、統合コントローラーが接続されているオブジェクトに基づいて自動で生成されますが、テーブルを編集して行と列がリストされる順序を変更できます。列内のXは、統合コントローラーが特定のレーンからスラッグをリリースする前に、クリアする必要がある決定点(またはその他のコンベヤロジック)を定義します。
次の画像では、統合コントローラーは決定点と通信してスラッグリリース間のギャップを閉じます。
処理フローを使用した鋸歯状の統合
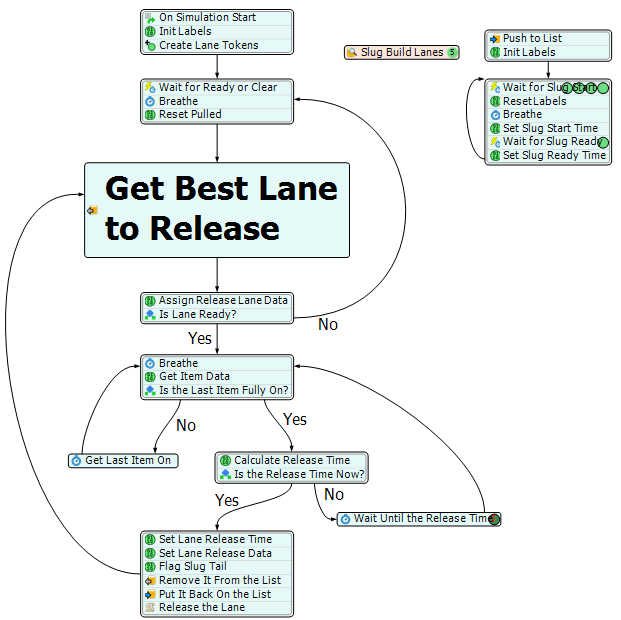
処理フローでテンプレートを使用すると、スラッグ間のギャップをさらに埋めるロジックを作成できます。次の画像は、処理フローを使用して理想的なリリース速度を決定する統合コンベヤシステムの例です。
モデルにこの処理フローを追加するには、メインツールバーの[処理フロー]ボタンを押してから、[オブジェクトの処理フローを追加]>[ギャップを最適化する統合コントローラー]を選択します。次に、既存の統合コントローラーを、この処理フローにアタッチします。
この統合を管理する処理フローを次に示します。
パワー&フリーシステム
パワーアンドフリーコンベヤシステムは、多くの製造環境に実装されています。これらのシステムで、ドッグはルーピングチェーンに沿って一定の間隔で移動します。これらのドッグはキャリアが通過するときにシステム内でそのキャリアトローリーをピックアップします。
FlexSimはコンベヤまたはコンベヤシステムのドッグの位置を追跡することによって、パワー&フリーシステムをシミュレーションします。アイテムがコンベヤ上で移動できるポイントは、次に通過するドッグの場所により定義されます。アイテムの移動準備ができると、ドッグをキャッチします。多くの場合、アイテムの移動にはキャタピラーのような集積効果があります。
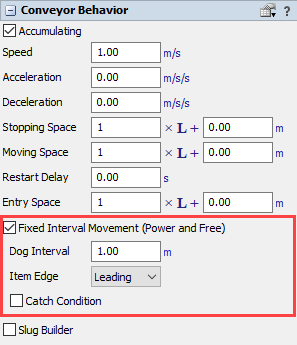
コンベヤのプロパティで、次を実行します。
- [一定間隔の移動(パワーアンドフリー)]チェックボックスをオンにし、パワーアンドフリー動作を有効にします。
- 必要に応じて、その他のパワー&フリープロパティ(先端やドッグ間の間隔にあるアイテムなど)を変更します。
モーターを使用してドッグを同期する
パワー&フリーシステムでモーターを使用することは必須ではありませんが、使用することをお勧めします。モーターは、パワー&フリーシステムにおける複数のコンベヤ間でドッグの位置を同期するのに役立ちます。たとえば、モーターの最初に接続されたコンベヤが10.2メートルでドッグのギャップが1.0メートルの場合、ドッグの位置は最初のコンベヤでは0.0で始まり、2番目に接続されたコンベヤでは0.8で始まるように設定されます(最初のコンベヤの終わりから次のドッグまでの残りの距離)。モーターは、コンベヤ間でアイテムを輸送する際に、コンベヤが不規則なギャップや停止を作成するのを防止します。
パワー&フリーシステムでモーターを使用するには:
- アイテムがコンベヤ間を流れる順序で、すべてのパワー&フリーコンベヤにモーターを接続します。
- モーターをダブルクリックして右側に[プロパティ]ウィンドウを開きます。[モーター]セクションの[パワーアンドフリーのドッグ位置を同期]ボックスをオンにします。
- モーターを使用してループ全体にわたってドッグの位置を同期する場合は、[連続ループ用にドッグのギャップを調整]チェックボックスをオンにします。
オーバーヘッドコンベヤを作成する
オーバーヘッドのパワー&フリーシステムを作成するには、アイテムのz軸を平行移動する必要があります。
- パワー&フリーシステム内の最初のコンベヤの先頭に、コンベヤロジックオブジェクト(決定点、ステーション、フォトアイ)を配置します。
- コンベヤロジックオブジェクトをクリックして、右側に[プロパティ]ウィンドウを開きます。[トリガー]セクションで、[追加]ボタン
 をクリックして、利用可能なトリガーのメニューを開きます。[到着時]または[ブロック時]を選択します。
をクリックして、利用可能なトリガーのメニューを開きます。[到着時]または[ブロック時]を選択します。 - 新しく追加されたトリガーの横にある[追加]ボタン をクリックして、メニューを開きます。[移動]を選択し、[アイテムを移動]を選択します。
- [コンベヤ上]設定を
-item.size.zや-2などの負の数に設定すると、移動中にコンベヤの下に吊り下がります。
モーターを停止または始動する
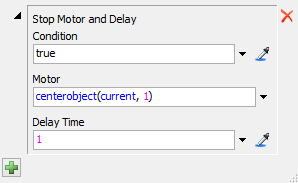
特定の条件が満たされるとコンベヤのモーターを停止、遅延、開始するように、コンベヤロジックオブジェクト(決定点、フォトアイ、ステーション)を設定できます。たとえば、フォトアイがブロックされた場合、フォトアイが再びクリアされるまでモーターを停止できます。モーターに接続されているコンベヤは、モーターが再開するまで停止します。
コンベヤロジックオブジェクトで[モーターを停止]または[モーターの停止と遅延]ピックリスト動作オプションを使用して、コンベヤを停止できます。[モーターを再開]ピックリスト動作を使用して、モーターを再開する条件を必ず追加してください。
モーターを効果的に停止するには、以下の条件が満たされていることを確認してください。
- センターポート接続(S接続)を使用してモーターをコンベヤロジックオブジェクトに接続します。
- コントロールする必要のあるすべてのコンベヤにモーターを接続します(A接続)。
- [モーターを停止]または[モーターの停止と遅延]ピックリスト動作を、コンベヤロジックオブジェクトで適切なトリガーに追加します。モーターを停止する条件を決定して条件プロパティに追加します。
- モーターが再開する条件が設定されていることを確認してください。適切なトリガーで[モーターを再開]ピックリスト動作を使用してこの条件を作成します。
フローアイテムの移動
コンベヤロジックオブジェクト(決定点、ステーション、フォトアイ)を使用して、フローアイテムが通過するときにフローアイテムを移動または変更できます。コンベヤロジックオブジェクトのトリガーには、一般的な移動アクションの多くをサポートする事前にプログラムされたピックリスト動作が用意されています。アイテムの位置や向き(回転、傾斜角度など)を変更する場合は、トリガーの[移動]サブメニューを使用します。[移動]サブメニューには、[アイテムを回転]と[アイテムを移動]の2つのオプションがあります。
[アイテムを回転]ピックリストは、アイテムがロジックコンベヤオブジェクトを通過するときにアイテムを回転します。
[アイテムを移動]ピックリストは、コンベヤを基準にしてアイテムの位置を移動します。
![]()
[アイテムを移動]オプションの使用方法の詳細なステップについては、「オーバーヘッドコンベヤを作成する」を参照してください。
[アイテムを回転]と[アイテムを移動]オプションは、キネマティクスに基づくオフセットを使用します。これらのピックリストオプションのいずれかを使用する場合、アイテムのプロパティ、ロジック、向きは変更されないことに注意してください(いくつかの例外については以下で説明します)。これらのほとんどは単にビジュアルに関するロジックです。以下に留意してください。
- コンベヤの前進軸に沿って(コンベヤに沿って前方または後方に)アイテムを移動すると、他のコンベヤロジックが不適切な点で視覚的に起動する可能性があるため、回避しなければならない場合があります。これは、コンベヤが実際に追跡している位置から前方または後方に視覚的にアイテムがオフセットされているためです。
- アイテムがコンベヤの左軸でオフセットされ、オフセット角度が適用されたフォトアイを通過すると、コンベヤの中心にあるかのように引き続きフォトアイがカバー/クリアされます。
ただし、このビジュアル限定のルールにはいくつかの例外があります。
- アイテムがサイド転送を開始すると、転送ロジックはアイテムのコンベヤ左側のオフセットを考慮して、転送を完了するまでのアイテムの移動距離を決定します。
- フォトアイの高さがゼロ以外の場合にアイテムの前端がフォトアイに到達すると、カバーロジックは、アイテムがフォトアイをカバーしているかどうかを判断する際に、アイテムの現在のコンベヤ上側オフセットを考慮します。
エリア制限
エリア制限は、特定のコンベヤまたはコンベヤのセグメントへのアクセスを制限するために使用できます。たとえば、次の画像に示すように、一度に1つのフローアイテムのみを許可するエリアを作成できます。
エリア制限システムを作成するには:
- 少なくとも2つのコンベヤロジックオブジェクト(決定点やフォトアイなど)をコンベヤシステムに追加します。上流のコンベヤロジックオブジェクトは制限エリアへの入口を指定し、下流のコンベヤロジックは制限エリアの出口を指定します。
- 上流のコンベヤロジックオブジェクトから下流コンベヤロジックオブジェクトへの入出力ポート接続(A接続)を作成します。
- 適切なトリガーをコンベヤロジックオブジェクトに追加します([到着時]、[ブロック時]トリガーなど)。
- 上流のコンベヤロジックオブジェクトの新たに追加されたトリガーで、[制限エリアを取得]ピックリストオプションを追加します。
- 別のトリガーを下流のコンベヤロジックオブジェクトに追加します。次に、そのトリガーに[制限エリアをリリース]ピックリストオプションを追加します。
「コンベヤチュートリアル 1.2 - 統合、エリア制限、スラッグの構築」と「コンベヤチュートリアル 1.3 - ギャップを追加、削除する」のいくつかの例を使用して作業できます。
ギャップを追加、削除する
コンベヤレーンを別のコンベヤレーンと統合するときに、フローアイテム間にギャップが必要な場合と不要な場合があります。
ギャップを追加する
[エリア制限]ピックリストは実際、コンベヤラインにギャップを追加する場合に効果的です。フローアイテムに固定および可変の両方のギャップを追加するために使用できます。詳細については、「エリア制限」を参照してください。
ギャップを削除する
通常、コンベヤシステムを必要とする主な理由は、フローアイテム間のギャップを減らして、システム全体のスループットを向上するためです。
統合するフローアイテム間のギャップを削除する場合、次のいずれか1つまたはすべてのステップを実行できます。
- コンベヤ角度を変更する - 統合コンベヤに対するフィードコンベヤの角度を変更します。可能であれば統合コンベヤツールを使用して、これらのコンベヤ間に曲線ありのコンベヤセクションを作成します。
- 転送設定を調整する - コンベヤ間の転送の角度設定を調整して、角度がサイド転送またはインライン転送とみなされるしきい値を増減します。詳細については、「サイド転送とインライン転送」を参照してください。
- 統合コントローラーで多くの決定点を使用する - 統合コンベヤラインに沿って決定点の数を増やすと、統合コントローラーがスラッグをリリースする速度が向上します。
- 処理フローテンプレートを使用する - 統合コントローラーの処理フローテンプレートを使用すると、ギャップを減らしてスループットを大幅に向上できます。
これらのギャップを削除する詳細なステップについては、「コンベヤチュートリアル 1.3 - ギャップを追加、削除する」で説明します。このチュートリアルには、コンベヤのギャップに効果的な追加のヒントや技術が記載されています。