AGVネットワーク
概要と主要な概念
AGVネットワークは、自動誘導車両(AGV)や他のタスク実行者をシミュレートしながら移動経路を作成するのに役立ちます。
AGVモジュールは、自身のAGVオブジェクトタイプをライブラリに追加しません。代わりに、AGVネットワーク上のコントロールポイントにタスク実行者(タスクエグゼキューター、オペレーター、トランスポーターなど)を接続でき、そのタスク実行者はAGV定義のロジックを使用して移動します。
[AGVタイプ]タブ
[AGVタイプ]タブについては、「AGVタイプ」を参照してください。
[コントロールポイントの接続]タブ
[コントロールポイントの接続]タブについては、「コントロールポイントの接続」を参照してください。
[累積タイプ]タブ
[累積タイプ]タブについては、「累積タイプ」を参照してください。
[割り当て解除タイプ]タブ
[割り当て解除タイプ]タブについては、「割り当て解除タイプ」を参照してください。
[一般]タブ
[一般]タブには、次のプロパティがあります。
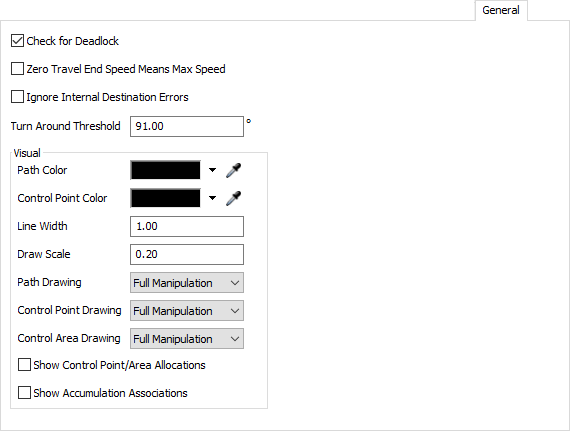
パスまたはコントロールポイントを右クリックし、[AGVネットワークプロパティ]を選択すると、[一般]ページが表示されます。
デッドロックを確認
チェックボックスをオンにすると、コントロールポイント/コントロールエリアの割り当てロジックはデッドロックサイクルがないか継続的に確認します。見つかった場合は、モデルを停止し、問題を通知します。デッドロック検出には追加の計算が必要であり、シミュレーションが遅くなる可能性があることに注意してください。そのため、デバッグ中にオンにして、デッドロック問題がすべて解決したら、オフに戻してください。
移動終了速度0は最高速度を意味する
チェックボックスをオンにすると、AGVでは、終了速度0の移動タスクが「AGVの最高速度で終了」と解釈されます。この動作は、ネットワークノードを使用する標準的なトラベルネットワークなど、他のFlexSim移動メカニズムではデフォルトです。しかしながら、AGVの場合、これはいつも望ましい動作であるとは限らないため、ここでこの設定を明示的に定義します。
内部目的地エラーを無視
オンにすると、輸送列本体内部の目的地としてAGV.BodyOffset.TrainLeadingEdgeまたはAGV.BodyOffset.TrainTrailingEdgeを使用しているときに発生した移動目的地エラーがシステムコンソールに出力されません。代わりに、AGVはすぐに移動タスクを終了します。
このエラーは、非常に特殊なケースで発生します。AGV輸送列の「前縁」をAGV輸送列の内部のAGVパスネットワーク上の目的地に移動させたい場合は、技術的にはその操作を正常に実行する方法はありません。これは、その目的地への輸送列移動の縁が何であっても「前縁」ではなく「後縁」になるためです。つまり、AGVを前提とすると、このようなタスクは技術的にエラーです。ただし、モデルによっては、このエラーを検出して回避するのは困難な場合があります。そのため、このボックスをオンにするはできますが、AGVは全く移動せずに移動タスクを終了するだけです。
パスの色
3Dビューでパスを描画するときの色を定義します。これは特に、CAD描画でモデルをオーバーレイしているとき、モデルとCAD線で構築されたAGVネットワークパス間を線で描くときに便利です。
コントロールポイントの色
3Dビューでコントロールポイントを描画するときの色を定義します。
線幅
基準となる幅をピクセルで定義します。モデル内のパスとコントロールポイントがこの幅で描画されます。
描画スケール
基準となするサイズを定義します。コントロールポイントとパスの方向矢印の描画をこのサイズで縮小拡大します。
パス描画、コントロールポイントの描画、コントロールエリアの描画
モデル内で個々のオブジェクトをどのように操作できるかを定義します。モデルの特定の部分を完了したとき、その中のオブジェクトに関して変更できるところを制限することがあります。オプションは次のとおりです。
- 完全操作 - 必要に応じてこれらのオブジェクトをクリックし、動かすことができます。
- クリックのみ可能 - これらのオブジェクトをクリックできますが、動かすことはできません。
- クリック不可 - 3Dビューでオブジェクトを表示できますが、クリックできません。
- 描画しない - 3Dビューでオブジェクトを表示できません。
コントロールポイント/エリアの割り当てを表示
主に、デバッグに使用されます。オンにすると、AGVネットワークが各AGVの現在の割り当てと要求された割り当てを3Dビューに描画します。これには、コントロールポイント、コントロールエリア、およびパス転送の割り当てが含まれます。現在の割り当てはオレンジ色で描画されますが、要求された割り当ては赤色で描画されます。
蓄積の関連付けを表示
主に、デバッグに使用されます。オンにすると、AGVネットワークが現在累積パス上を移動しているAGV間に線を描画します。各AGVからその前のAGVとその後ろのAGVまで青色の線を描画します。
ウェイポイント
ウェイポイントは、AGVがコントロールポイントを通過するときに発生するAGVコントロールロジックを定義するために使用されます。しかしながら、今後は、AGVコントロールについてはウェイポイントの代わりに処理フローを使用することをお勧めします。FlexSimはテンプレートAGVコントロール処理フローを提供します。これは、AGVコントロールロジックを定義するための出発点として使用できます。
[ウェイポイント]タブには次のプロパティがあります。
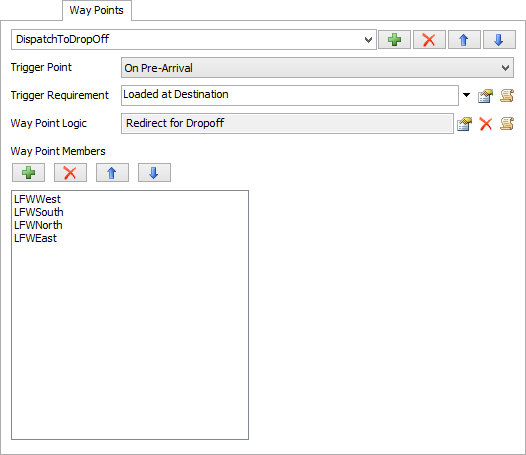
パスまたはコントロールポイントを右クリックし、[AGVネットワークプロパティ]を選択すると、[ウェイポイント]ページが表示されます。
ウェイポイントリスト
ここでは、各ウェイポイントを追加、削除、並べ替え、名前変更できます。
トリガーポイント
ウェイポイントロジックを起動するタイミングがこれで定義されます。オプションは次のとおりです。
- 到着前 - ウェイポイントロジックは、AGVが減速を開始し、ウェイポイントで停止するタイミングで起動します。
- 到着時 - AGVがウェイポイントに到着したときにウェイポイントロジックが起動します。トリガー要件が満たされ、このトリガーポイントが選択されている場合、ウェイポイントがAGVの最終宛先ではない場合でも、AGVは減速してこのウェイポイントで停止し、ウェイポイントを起動します。したがって、AGVを停止まで減速させない場合、[到着前]を使用してください。
トリガー要件
ウェイポイントを起動する場合は1を返し、起動しない場合は0を返すフィールド。
ウェイポイントロジック
ウェイポイントのコード。
ウェイポイントのメンバー
このウェイポイントの一部であるコントロールポイントのリスト。ここでは、メンバーリストを追加、削除、並べ替えできます。